I compare a B&C 15TBX100 in a 120 liter BR with a 300 cm2 cross section area port 50 cm long. B&C recommends a 114 liter BR box tuned to 35 Hz for the 15TBX100 so its seems like a reasonable BR to me.
The 15TBX100 is to weak for the HROAR, and thats why I use the 15DS115 for my HROAR.
The 15TBX100 is to weak for the HROAR, and thats why I use the 15DS115 for my HROAR.
Last edited:
By EQuing the same, you just provided the same damping factors. In the case of Roar, it is segment that provide acoustic resistance, whereas for bass reflex, it is more electrical damping.View attachment 755614
View attachment 755615
None of this shows the wave form reproduced when the driver is fed a bandwidth limited transient or other nonlinear non-sinuoidal signal...
You prefer probably instinctivly acoustic damping than electrical, but yet amplifiers are full of electrical damping which you yet trust in inside your amplifiers.
None of them (acoustic/electrical damping) provide instantaneous stop without motional feedback. But it is still a good start to give curves with good damping factor. I showed that unEQed, Roar is a pretty bad damped design.
See Ipal pressure sensor patent for figures examples.
Attachments

I showed that unEQed, Roar is a pretty bad damped design
I can´t agree on that.
UnEQed the BR fared worse then the HROAR with lots of low frequency rumble up to about 36 ms whereas the HROAR was basically silent except some 100 - 200 hz echoes at -20 to -24 dB after 20 ms.
See my unEQed sims a few post back.
And then it is this:

Both at 125 dB output. And the BR has a generous 300 cm2 port area.
Simulations at one single watt is one thing. Real life use with nonlinear and non-sinusoidal content is something else. BR seldom sound any better with high port-velocities and turbulent flows leading to driver-offset due to uneven flows in the port(s).
And this leads me to the next problem with BR.
In a BR the midbass can com from a powerful 15 inch driver while it relies on a 4 inch pipe to reproduce the bass. I can´t find any other area where the radiating surface area is reduced with lower frequencies. A 4 inch (or two) port does not have a radiation pattern or effective coupling that will work well with a 15 inch midbass driver. The Helmholtz resonator is still only a somewhat loosely coupled sine wave oscillator that is unable to reproduce any complex wave shapes.
A BR is still only a half descent midbass driver elastically coupled to a lagging sine wave oscillator with to little radiating surface to create a real chock wave. (compare with a front laded horn again).
Last edited:
Did you see this response ?...delay...BR is overall "printed/centered" spectrogram with more time delay by hornresp. It's overall more on the right.
The red 0db energy is centered on the right of the 0ms mark for the bass reflex, but to the left for roar. It's just a 5ms artifact delay... look closer.
I totally agree about port velocity. TH have more power capabilities, we agree on this.
And talking about radiation pattern for low range...please. In low range, it's pressure, no more wave. Since port is low passed, it doesn't have to produce complex stuff. It's just as any multiway speaker. And no one would want to use a bass reflex sub for midrange duty... Midrange speaker too can't reproduce complex stuffs that is usually for tweeters. Nothing new.
Don't forget you got vent too in Roar/TH that are blended in front chamber/front segment, instead of in room/outdoor...
You got a conceptual problem. A TH with a big back chamber and no front chamber or pipe is what you call a bass-reflex. Those are not as different as you try to show. Yet, Roar got straight pipe. There's not only a good way to do a TH, and only a bad way to do bass reflex.
Of course TH got efficiency advantages, using 1 big speaker powerful speaker is not a problem, while for bass reflex, it would be better to use two boxes (compression/chuffing and thermal problem wise).
And talking about radiation pattern for low range...please. In low range, it's pressure, no more wave. Since port is low passed, it doesn't have to produce complex stuff. It's just as any multiway speaker. And no one would want to use a bass reflex sub for midrange duty... Midrange speaker too can't reproduce complex stuffs that is usually for tweeters. Nothing new.
Don't forget you got vent too in Roar/TH that are blended in front chamber/front segment, instead of in room/outdoor...
You got a conceptual problem. A TH with a big back chamber and no front chamber or pipe is what you call a bass-reflex. Those are not as different as you try to show. Yet, Roar got straight pipe. There's not only a good way to do a TH, and only a bad way to do bass reflex.
Of course TH got efficiency advantages, using 1 big speaker powerful speaker is not a problem, while for bass reflex, it would be better to use two boxes (compression/chuffing and thermal problem wise).
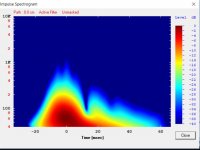
Hey guys, don't mean to crash into this thread inappropriately.
But I have insufficient experience with hornresp to know how to fairly interpret its spectrograms.
So I've attached a hornresp spectro from the BR sub I posted about in post #22 this thread. (the sub is actually a dual 18" slot loaded BR)
So hopefully, since it's essentially a BR, it fits this thread well.
What is the secondary peak at 20ms? thx!
(Filters are BW3 @ 24hp, and BW8 @100 LP)
But I have insufficient experience with hornresp to know how to fairly interpret its spectrograms.
So I've attached a hornresp spectro from the BR sub I posted about in post #22 this thread. (the sub is actually a dual 18" slot loaded BR)
So hopefully, since it's essentially a BR, it fits this thread well.
What is the secondary peak at 20ms? thx!
(Filters are BW3 @ 24hp, and BW8 @100 LP)
Attachments
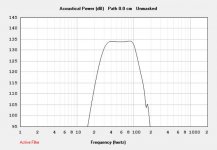
Nulling, not spike. Make eq so curve shape is round and no more that flat it will disappear, "damping" curve corners. And that fast slopes explain curves low on right side, it is group delay.
Last edited:
Nulling, not spike. Make eq so curve shape is round and no more that flat it will disappear, "damping" curve corners. And that fast slopes explain curves low on right side, it is group delay.
Aah, I see, thank you !
Not used to dealing with minimum-phase crossovers...it's nice not to have to fool with that..
Last edited:
See Ipal pressure sensor patent for figures examples.
The control system from IPAL is really nice and to align with shared picture I'd like to reinforce, active system with closed loop is the best way to improve/change system dynamic for almost any type of system.
One thing that may help mates to see a good correlation with audio driver is vehicle suspension. See the video bellow and pay attention at the differences.
YouTube
The bumps could be called transients and the road irregularity the steady state.
The targets are different, while at suspension you don't want the vehicle to copy the road profile and keep cabin as flat as possible, at audio stuff I'd like to make the drive copy the voltage signal profile in a precise way.
Another example would be the "Exoskeleton" you want it to perfectly copy the movement from the operator, even at transients like jumping, imagine if it response isn't precise enought, you will became more tired using it them without it 😀
YouTube
Regardless the target, active systems with feedback loop and PID controller do a lot of magics (engineering) in a precise way.
Did you see this response ?

Did you see this response?
Without EQ or crossover the HROAR comes out on top, while they become quite equal with heavy electronic EQ and bandpass limiting.
All this is at low level where nonlinear acoustic effects is a non-issue.
Already att 100 watts the BR becomes much worse in every possible way.
A BR has all the disadvantages of nonlinear acoustic effects (port compression, detuning the Helmholtz resonance, creating lots of out of band noise, uneven port turbulence skewing the working point of the driver etc etc...) while a ROAR or horn will benefit to some extent from the nonlinear acoustic effects. With a careful design it will counteract the thermal compression of the driver. The port compression of a BR will only reinforce and exaggerate the thermal compression of the driver in detuning the Helmholtz and compressing the sound output, diminishing the dynamics.
Roar got pipe too...Hornresp measure pressure at mouth but there's pressure in Roar pipe too. If there's detuning from pipe, there's no reason that other designs with pipe don't sufers from this too. Any design with pipe got port compression and chuffing at some point. Akabak allow to see pipe air velocity at any point and it should be calculated.
You point some problems only for bass reflex even while you explain them due to characteristics that your praised design share... It's just not fair.
For everything else I pretty agree, as already said.
And the heavier EQ is on ROAR side ^^
You point some problems only for bass reflex even while you explain them due to characteristics that your praised design share... It's just not fair.
For everything else I pretty agree, as already said.
And the heavier EQ is on ROAR side ^^
I'm still reserved on the real effect at longer distance, since air pressure should undamp, add some ringing, to some point. At least, in room, it's evidence. Do air can perfectly vehicule half a period sine wave, or the corrected signal shown from ipal ? I don't think so. I'd like to see evidences.The control system from IPAL is really nice and to align with shared picture I'd like to reinforce, active system with closed loop is the best way to improve/change system dynamic for almost any type of system.
One thing that may help mates to see a good correlation with audio driver is vehicle suspension. See the video bellow and pay attention at the differences.
YouTube
The bumps could be called transients and the road irregularity the steady state.
The targets are different, while at suspension you don't want the vehicle to copy the road profile and keep cabin as flat as possible, at audio stuff I'd like to make the drive copy the voltage signal profile in a precise way.
Another example would be the "Exoskeleton" you want it to perfectly copy the movement from the operator, even at transients like jumping, imagine if it response isn't precise enought, you will became more tired using it them without it 😀
YouTube
Regardless the target, active systems with feedback loop and PID controller do a lot of magics (engineering) in a precise way.
As already pointed, multi-sub is the way to go to conteract it somewhat.
.Hornresp measure pressure at mouth but there's pressure in Roar pipe too. If there's detuning from pipe, there's no reason that other designs with pipe don't sufers from this too. Any design with pipe got port compression and chuffing at some point.
True!
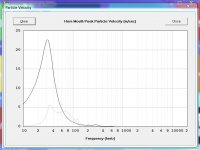
I simulated the first tapped pipe section of the ROAR and compared it to the 120 liter BR at approximately the same power level.

I use the ROAR and HROAR as examples not because I want to tout my own designs, but because I know them well and use them daily. I don´t want to only use theoretical models that I have no first hand experience from.
I am resting my feet in the mouth of my first HROAR prototype while i´m typing this, and using a familiar design makes it much easier to take measurements and do real world tests of them. I don´t want to write about things I am not very familiar with.
I have pushed my first ROAR12 prototype to a very sharp sizzeling and grating noise. It was a really ugly hard chuffing and I believe there was a local turbulent supersonic airflow round some hard and sharp edge near the TP outflow into the front resonator.

a 500 cm2, 240 cm long tapped pipe with a B&C 15DS115 at 2 kilowatt to illustrate high flow rates at the tapped pipe mouth at high power levels.
30 m/s is far from supersonic, but 30 m/s blown over a sharp plywood edge can create local supersonic turbulent airflow (a local turbulent edge vortice with at least 12 times increase in air flow speed).
I have never managed to create this effect in TP, TPCH, ROAR and HROAR designs where I have rounded all the edges inside the pipes with a router, despite using 5 kilowatt class D car amplifiers and extremely powerful high xmax, high Bl spl-competition drivers.
I was driving my ROAR12 with a Powersoft K20 close to clipping with no high pass filtering and +3 dB EQ at 35 Hz. The cone moved near xmax (12 - 16 mm). The ROAR design really keeps the cone well controlled, as I have never managed to drive any driver beyond xmax despite using more then ten times the rated power of the driver. The voice coil gets very hot very fast though. I would not keep up these power levels more then a few seconds at a time or it would fry the voice coil for sure. (it was a deliberate try at destructive testing where I wanted to see if I could break the driver through excessive cone amplitude or pressure against the cone)
The big difference is how the different designs use the nonlinear acoustic effects. The large straight quarter wave "planar" front resonator counteracts the thermal effects of the driver and damps the exit flow of the tapped pipe section.
Attachments
Last edited:
What non linear effect are you exactly refering to ? All got a name. Is that voicecoil offset, assymetric force factor, unlinear compliance, you mentioned thermal non linearity...ok. So it's about keeping voicecoil fresh to keep it resistance from rising g with power to avoid force factor getting low ? If so it is a characteristic of most TH. Damping exit flow, is what i was refer simplier as acoustic low pass. Since long pipes needed for TH/ROAR to work create "non linear" stuff (resonnances) in midrange bandwith (that is not the case of BR), of course it is a good idea to acoustical low pass them to compensate ^^. In all case, all TH require steep slope for crossing with low-mid way, whereas BR can go higher flatter and so, all in all, BR may require smaller low-midrange boxes, that don't go as low as require with TH. Again, it is a matter of compromise. If i'm wrong, please correct me (i'm good at beeing wrong ^^)
The thing that is maybe unintentionnally interesting with ROAR compared to other TH is that pipe is maybe more symetrically working, helping with voicecoil offset helping keeping DC pressure the same on both sides of the cone, but this is a big guess...i don"t know at all, it's really intuitive. I would have liked to found something about DC pressure each side of speaker cones, but even in ipal papers with their pressure sensor i didn't found anything about it, even if it is a evidence that pressure sensor would prefer working without rising pressure offset.
The thing that is maybe unintentionnally interesting with ROAR compared to other TH is that pipe is maybe more symetrically working, helping with voicecoil offset helping keeping DC pressure the same on both sides of the cone, but this is a big guess...i don"t know at all, it's really intuitive. I would have liked to found something about DC pressure each side of speaker cones, but even in ipal papers with their pressure sensor i didn't found anything about it, even if it is a evidence that pressure sensor would prefer working without rising pressure offset.
Last edited:
If i'm wrong, please correct me (i'm good at being wrong ^^)
Once again I must disagree with you! 😉🙂
I find you very knowledgeable, even though we might see things quite differently and we seem to have very different past experience of music reproduction.
I know i´m usually quite controversial with a lot of ideas that go 180 degrees contrary to mainstream "knowledge". I love to experiment and I am not at all afraid to design things based on my own ideas without any consideration of common held knowledge or praxis.
I have learned a ton of stuff from discussing this subject with you, and I might be wrong about all of this. I just try to present and convey my ideas as best as I can, despite a total lack of technical education (I am not an engineer or schooled in physics and acoustics in any way except my own empirical knowledge gained through many years of experiments and experience).
Any discussion worth having must contain different ideas, theories and opinions. If no ideas crash head to head in a discussion, one might as well have the discussion with a mirror.
Cheers,
Johannes
The fact isn't that I disagree. I just ask for what exactly you're talking about, so that i can't even know if I disagree ^^ That's why I tell what I suppose it can explain what you're saying...
It depends on the purpose of the "discussion" This thread is about how GD in a woofer effects the transient response of the speaker system as a whole. I think you still may not understand how the "transient" is reproduced by the system, it's hard to tell because some of your posts appear ambiguousI know i´m usually quite controversial with a lot of ideas that go 180 degrees contrary to mainstream "knowledge". I love to experiment and I am not at all afraid to design things based on my own ideas without any consideration of common held knowledge or praxis.
Any discussion worth having must contain different ideas, theories and opinions. If no ideas crash head to head in a discussion, one might as well have the discussion with a mirror.
Cheers,
Johannes



- Status
- Not open for further replies.
- Home
- Loudspeakers
- Subwoofers
- Ported sub with good transient response