Hey Panos,
That's a great outcome. Well done!
As has been the case at my end, I think you will find a higher wattage Linear Power Supply - delivering up to 24V - will improve the smoothness of both of your DC motors.
In terms of making motor performance comparisons, unless you own some sort of fancy vibration meter - I'd love to know about that! - playing the turntable and listening to very familiar recordings seems to be the best way of measuring results. So, I wouldn't put too much stock in how each motor feels running in your hand. Ears rule! 😉
Niffy has been correct about everything so far, so I think you can probably bank on the fact that there is a nice improvement waiting ahead, by using your nice new MAXON motor. No regrets.
I'd like to add that if you ever decide to permanently return to the conventional shortest belt/no idler configuration, there is another nice improvement waiting for you, by using a SEAMLESS SILICONE BLUE BELT. This type of belt allows you to run the belt with a lot less tension, which helps playback in so many ways:
Less tension on belt passes less motor noise to the sub-platter.
Less tension on the belt prevents excessive bearing wear on the DC motor, which again minimises motor vibrations.
Less tension on belt minimises "tipping" of the platter, avoiding skewing of the main bearing.
Less tension on the platter minimises belt/pulley "adhesion" which can cause vibrations of its own.
Basically, the dampening qualities of silicone - combined with the fact that it is so elastic that you can run the belt almost drop-off loose - work together to deliver a very nice upgrade to decks like ours.
It's a cheap upgrade, compared to the other improvements we have been discussing in this thread.

That's a great outcome. Well done!
As has been the case at my end, I think you will find a higher wattage Linear Power Supply - delivering up to 24V - will improve the smoothness of both of your DC motors.
In terms of making motor performance comparisons, unless you own some sort of fancy vibration meter - I'd love to know about that! - playing the turntable and listening to very familiar recordings seems to be the best way of measuring results. So, I wouldn't put too much stock in how each motor feels running in your hand. Ears rule! 😉
Niffy has been correct about everything so far, so I think you can probably bank on the fact that there is a nice improvement waiting ahead, by using your nice new MAXON motor. No regrets.
I'd like to add that if you ever decide to permanently return to the conventional shortest belt/no idler configuration, there is another nice improvement waiting for you, by using a SEAMLESS SILICONE BLUE BELT. This type of belt allows you to run the belt with a lot less tension, which helps playback in so many ways:
Less tension on belt passes less motor noise to the sub-platter.
Less tension on the belt prevents excessive bearing wear on the DC motor, which again minimises motor vibrations.
Less tension on belt minimises "tipping" of the platter, avoiding skewing of the main bearing.
Less tension on the platter minimises belt/pulley "adhesion" which can cause vibrations of its own.
Basically, the dampening qualities of silicone - combined with the fact that it is so elastic that you can run the belt almost drop-off loose - work together to deliver a very nice upgrade to decks like ours.
It's a cheap upgrade, compared to the other improvements we have been discussing in this thread.
Hi Sondeknz,
Interesting what you have to say about making belts from silicone rubber.
I've been in the opposite camp of using a low stretch belt material. My current belts are made from 1.5mm diameter nitrile rubber, the same material used for O-rings. Belt materials like mylar and sewing thread are also commonly selected for their low stretch.
It seems that in turntable design (or any aspect of hifi) you will get advocates of ideas at opposite ends of the spectrum. High mass against low mass, long arm length against short, suspended against unsuspended. Basically every design choice and they can all lead to good results.
When developing my belts I did buy some 2mm silicone and 2mm nitrile rubber so I could compare between them. Unfortunately 2mm was too thick and fouled the idler wheel supports. As I was aiming for low stretch I didn't pursue silicone further as it was much stretchier.
Maybe I should revisit belt material and try making a set of belts from 1.5mm silicone. It would only cost a couple of quid to buy enough to make the 3 belts I require.
Niffy
Interesting what you have to say about making belts from silicone rubber.
I've been in the opposite camp of using a low stretch belt material. My current belts are made from 1.5mm diameter nitrile rubber, the same material used for O-rings. Belt materials like mylar and sewing thread are also commonly selected for their low stretch.
It seems that in turntable design (or any aspect of hifi) you will get advocates of ideas at opposite ends of the spectrum. High mass against low mass, long arm length against short, suspended against unsuspended. Basically every design choice and they can all lead to good results.
When developing my belts I did buy some 2mm silicone and 2mm nitrile rubber so I could compare between them. Unfortunately 2mm was too thick and fouled the idler wheel supports. As I was aiming for low stretch I didn't pursue silicone further as it was much stretchier.
Maybe I should revisit belt material and try making a set of belts from 1.5mm silicone. It would only cost a couple of quid to buy enough to make the 3 belts I require.
Niffy

I've just ordered in some silicone for making a set of belts. I also ordered some polyurethane that is designated for use as drive belt.
As I've tested and experimented with pretty much every aspect of the design and materials for my deck it wouldn't hurt to revisit belts. Even if I end up finding out that my current belts are the best the process of finding out should be fun.
I originally used a single flat Origin Live belt that passed around the motor pulley and both idler wheels. Switching to the use of three separate belts, one for the motor pulley and one each for the idlers was a big upgrade. I suspect that this had more to do with the configuration than the belt material.
Niffy
As I've tested and experimented with pretty much every aspect of the design and materials for my deck it wouldn't hurt to revisit belts. Even if I end up finding out that my current belts are the best the process of finding out should be fun.
I originally used a single flat Origin Live belt that passed around the motor pulley and both idler wheels. Switching to the use of three separate belts, one for the motor pulley and one each for the idlers was a big upgrade. I suspect that this had more to do with the configuration than the belt material.
Niffy
Hey Niffy,
Great intel, as always.
If I could reconfigure my LP12 drivetrain in any way, it would be to replicate the 3-pulley “Vector” drive that ( I think) you were alluding to, above.
This is because a Vector type approach allows for equal bearing load in a full 360°. Then a high-tension belt is less damaging, although it probably does more faithfully transfer motor noise, than a looser belt.
Every other approach - that I have seen - seems to deliver imbalanced main bearing load, because of the need for high tension. And a 33RPM bearing is a loose bearing, not forgiving of side thrust. Therefore, in this scenario, to my mind, a high-tension belt is the killer; not a high elastic belt.
It is my understanding that low stretch belts like mylar, string and monofilament need high tension in order to achieve traction - thereby causing many of the high-tension platter and bearing problems that I mentioned in an earlier post.
A very loose, high-elastic silicone belt seems to solve most of these problems.
Because my LP12 has no LINN springs and grommets - AUDIOSILENTE SILICONE MUSHROOMS instead - this factor also helps improve platter tilt issues.
I am not an expert - and happy to be proven wrong about this - so, I really welcome your belt experiments and feedback.
Great intel, as always.
If I could reconfigure my LP12 drivetrain in any way, it would be to replicate the 3-pulley “Vector” drive that ( I think) you were alluding to, above.
This is because a Vector type approach allows for equal bearing load in a full 360°. Then a high-tension belt is less damaging, although it probably does more faithfully transfer motor noise, than a looser belt.
Every other approach - that I have seen - seems to deliver imbalanced main bearing load, because of the need for high tension. And a 33RPM bearing is a loose bearing, not forgiving of side thrust. Therefore, in this scenario, to my mind, a high-tension belt is the killer; not a high elastic belt.
It is my understanding that low stretch belts like mylar, string and monofilament need high tension in order to achieve traction - thereby causing many of the high-tension platter and bearing problems that I mentioned in an earlier post.
A very loose, high-elastic silicone belt seems to solve most of these problems.
Because my LP12 has no LINN springs and grommets - AUDIOSILENTE SILICONE MUSHROOMS instead - this factor also helps improve platter tilt issues.
I am not an expert - and happy to be proven wrong about this - so, I really welcome your belt experiments and feedback.
Last edited:
PS: This is what I meant, when (above) I referred to the 3-pulley "Vector" drive. A PINK TRIANGLE specialty, if I recall...

Hi Sondeknz,
The vector drive is indeed a Pink Triangle speciality. I thought I was being really original and clever when I came up with the idea only to find out that Arthur had already been doing it for years. 😂.
My setup is slightly different to the Vector drive. As the side forces on the bearing are effectively eliminated the bearing sleeve becomes irrelevant and only serves to increase friction and noise. So I removed it. My bearing truly is a single point bearing.
The only issue I suffered, when using the single belt, was that imbalanced records could cause poor runout, the platter could wobble a bit. Going to the three belt setup completely cured this.
It might be a little while before I can experiment with the alternative belt materials. Unfortunately I had to order them from China as the 1.5mm I required didn't seem to be available (at a sensible price) in the UK.
At least I won't have a problem with getting the belts mixed up. The nitrile is black, the silicone is white and the polyurethane is red. I hope that the polyurethane doesn't sound the best as I don't think red belts would suit my deck.
Niffy
The vector drive is indeed a Pink Triangle speciality. I thought I was being really original and clever when I came up with the idea only to find out that Arthur had already been doing it for years. 😂.
My setup is slightly different to the Vector drive. As the side forces on the bearing are effectively eliminated the bearing sleeve becomes irrelevant and only serves to increase friction and noise. So I removed it. My bearing truly is a single point bearing.
The only issue I suffered, when using the single belt, was that imbalanced records could cause poor runout, the platter could wobble a bit. Going to the three belt setup completely cured this.
It might be a little while before I can experiment with the alternative belt materials. Unfortunately I had to order them from China as the 1.5mm I required didn't seem to be available (at a sensible price) in the UK.
At least I won't have a problem with getting the belts mixed up. The nitrile is black, the silicone is white and the polyurethane is red. I hope that the polyurethane doesn't sound the best as I don't think red belts would suit my deck.
Niffy
Niffy,
Sounds exciting… and colourful!
The vector system is an interesting concept and I think - like all solution designs - there are probably several different variations on how it can best be configured.
I would very much like to implement some of my own takes on a vector system - or at very least, try some of my ideas and see how they perform.
If you get the chance, it would be great to get some pics up - to get a clear view of your rig and how you have approached the particular design challenges involved.
Sounds exciting… and colourful!
The vector system is an interesting concept and I think - like all solution designs - there are probably several different variations on how it can best be configured.
I would very much like to implement some of my own takes on a vector system - or at very least, try some of my ideas and see how they perform.
If you get the chance, it would be great to get some pics up - to get a clear view of your rig and how you have approached the particular design challenges involved.
Prior to repairing my ORIGIN LIVE SCU, I too had been looking at other LP12 drivetrain options, one of which was the MOBER DC MOTOR KIT.
I knew that MOBER had chosen to work with a MAXON motor but was unsure which model. I wondered if it was the same MAXON motor that has been praised within the posts on this thread.
I received confirmation overnight that the MAXON motor used in the current MOBER DC MOTOR KIT is MAXON Model 110189.
Checking this out online at MAXON it seems this model 110189 is part of the MAXON A-MAX 26 family of ∅26 mm, precious metal brushes CLL, 7 watt motors. Pricing is €129.68.
@niffy @pkonstantinidis
Is this a very similar motor to the one that you guys are using?
Is it worth considering for running with our OL SCU?

I knew that MOBER had chosen to work with a MAXON motor but was unsure which model. I wondered if it was the same MAXON motor that has been praised within the posts on this thread.
I received confirmation overnight that the MAXON motor used in the current MOBER DC MOTOR KIT is MAXON Model 110189.
Checking this out online at MAXON it seems this model 110189 is part of the MAXON A-MAX 26 family of ∅26 mm, precious metal brushes CLL, 7 watt motors. Pricing is €129.68.
@niffy @pkonstantinidis
Is this a very similar motor to the one that you guys are using?
Is it worth considering for running with our OL SCU?
Last edited:
Hi Sondeknz,
well, visually it looks quite similar, although I understand it's slightly smaller in diameter compared to our RE-max 226764 motor (26mm vs 29mm). The key differences in parameters of interest is that the A-max motor has less torque (15.2mNm vs. 25.6mNm) and also an increased speed/torque constant ratio (1.69 vs. 0.34). According to Niffy, that ratio should be as low as possible.
So, in that context, the A-max motor may be perfectly suitable for your application, but the RE-max motor may be better. However, the RE-max motor is almost twice as expensive, and we do not know whether it's twice as good. In any case, we all know well that in hi-fi the value-cost function is not linear. Taking the subjective improvement that a motor can yield, the delta in price might be fully acceptable, in comparison to other more expensive upgrades, which may have a lesser effect on sound quality.
As always, the decision is yours.
P.S. Without having heard the RE-max motor yet, what I have found noteworthy (compared to my current Premotec motor) is that the RE-max, when turning the shaft with the hand, takes quite some time to slow down until it rests. It's as if the motor has high inertia or a hidden flywheel somewhere. Apologies for the crude description, but that's something that caught my attention at first encounter.
well, visually it looks quite similar, although I understand it's slightly smaller in diameter compared to our RE-max 226764 motor (26mm vs 29mm). The key differences in parameters of interest is that the A-max motor has less torque (15.2mNm vs. 25.6mNm) and also an increased speed/torque constant ratio (1.69 vs. 0.34). According to Niffy, that ratio should be as low as possible.
So, in that context, the A-max motor may be perfectly suitable for your application, but the RE-max motor may be better. However, the RE-max motor is almost twice as expensive, and we do not know whether it's twice as good. In any case, we all know well that in hi-fi the value-cost function is not linear. Taking the subjective improvement that a motor can yield, the delta in price might be fully acceptable, in comparison to other more expensive upgrades, which may have a lesser effect on sound quality.
As always, the decision is yours.
P.S. Without having heard the RE-max motor yet, what I have found noteworthy (compared to my current Premotec motor) is that the RE-max, when turning the shaft with the hand, takes quite some time to slow down until it rests. It's as if the motor has high inertia or a hidden flywheel somewhere. Apologies for the crude description, but that's something that caught my attention at first encounter.
Hi Panos,
Many thanks for the thoughts on the MAXON motors and the potential differences between models.
What is this speed/torque constant ratio (1.69 vs. 0.34) that you mention above? What is it actually comparing and why is a low ratio important?
I was also wondering: Did your MAXON motor arrive with any type of mounting-flange or mounting-plate that would make (conventional) LP12 mounting easy?
Or are you on your own having to mess around with a homebake mounting solution?
What about a pulley. Does MAXON supply anything at all?
Many thanks for the thoughts on the MAXON motors and the potential differences between models.
What is this speed/torque constant ratio (1.69 vs. 0.34) that you mention above? What is it actually comparing and why is a low ratio important?
I was also wondering: Did your MAXON motor arrive with any type of mounting-flange or mounting-plate that would make (conventional) LP12 mounting easy?
Or are you on your own having to mess around with a homebake mounting solution?
What about a pulley. Does MAXON supply anything at all?
Hi Sondeknz, Panos.
I haven't actually mentioned a speed/torque constant ratio in any of my posts. I have discussed the method of calculating the required speed constant based on sub-platter diameter, pulley diameter and desired voltage.
The Maxon A-Max 110189 is, I believe, the same motor as used by Linn in the Radikal mk1. The actual model number is 353084 which is exactly the same as the 110189 but with cable tails rather than terminals. My friend has a Radikal mk1 that we are looking at the feasibility of fitting to other decks. The Linn motor is wrapped in foam that makes identification difficult. From what I could see without removing the foam it was an A-Max. I measured the terminal resistance, 30.1Ω, and the speed constant, 192rpm/v, which are almost exactly the specs of the 110189, within measurement error. From what I can ascertain the a Re-Max range are generally slightly higher quality than the A-Max, which would explain the higher price and torque. It looks like these ranges of motor are not in the standard catalogue so might take a while to turn up if ordered.
The Maxon motors do not come with any mounting hardware. The Re-Max 29, A-Max 26 and the DCX 22&26 all have M2 threaded holes on a 17mm diameter. Exactly the same as the Premotec used by Origin Live as the DC200. The Maxon motors can be fitted to the OL mounting bracket using the same screws. I believe the DC100 uses the same mounting configuration.
Niffy
I haven't actually mentioned a speed/torque constant ratio in any of my posts. I have discussed the method of calculating the required speed constant based on sub-platter diameter, pulley diameter and desired voltage.
The Maxon A-Max 110189 is, I believe, the same motor as used by Linn in the Radikal mk1. The actual model number is 353084 which is exactly the same as the 110189 but with cable tails rather than terminals. My friend has a Radikal mk1 that we are looking at the feasibility of fitting to other decks. The Linn motor is wrapped in foam that makes identification difficult. From what I could see without removing the foam it was an A-Max. I measured the terminal resistance, 30.1Ω, and the speed constant, 192rpm/v, which are almost exactly the specs of the 110189, within measurement error. From what I can ascertain the a Re-Max range are generally slightly higher quality than the A-Max, which would explain the higher price and torque. It looks like these ranges of motor are not in the standard catalogue so might take a while to turn up if ordered.
The Maxon motors do not come with any mounting hardware. The Re-Max 29, A-Max 26 and the DCX 22&26 all have M2 threaded holes on a 17mm diameter. Exactly the same as the Premotec used by Origin Live as the DC200. The Maxon motors can be fitted to the OL mounting bracket using the same screws. I believe the DC100 uses the same mounting configuration.
Niffy
The Maxon motors do not come with any mounting hardware. The Re-Max 29, A-Max 26 and the DCX 22&26 all have M2 threaded holes on a 17mm diameter. Exactly the same as the Premotec used by Origin Live as the DC200. The Maxon motors can be fitted to the OL mounting bracket using the same screws. I believe the DC100 uses the same mounting configuration.
Thanks for the good oil, Niffy.
Just to be clear, are you saying that the MAXON DC motors also utilise the triangular-shaped, three bolt configuration for mounting?
So, in theory, either the MAXON RE-Max 29 or A-Max 26 could simply transplant my aging PREMOTEC OL DC-100 and bolt straight into my OL square mounting plate...
This is sounding very positive.
This would just leave the pulley issue to resolve!
Hi guys,
the ratio between speed and torque constants was mentioned by a friend, who has experience with Maxon motors. But his comment
"The relation from speed-constant (Ks) to torque-constant (Kt) is cruical for the function of the speed regulation- it should be as low as possible.
Maxon 226764 is possibly the best in this respect." was actually referring to the "negative impedance controller", originally proposed by Bruce Trump. I do not know whether that applies to the OL controller, too.
From my side, I've left the OL controller with the new 6,800μF Nichicon cap playing, so that the cap can form.
In the meantime, I have preparing to test various drivetrain approaches. Part from the rim drive, with respect to belt-drive, I have recently received Mylar tape (5mm width) and also polyester thread. It's so thin, you can hardly see it.
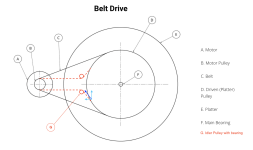
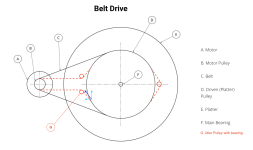
Last but not least, taking inspiration from Niffy's drivetrain as well as from Artemis Labs, too, the belt drive approach is related to the friction coefficient of the belt. As a rule of thumb, elastic belts have higher friction coefficient (and thus require minimal contact area), while other materials (e.g. mylar or thread) have lower friction coefficient, thus requiring higher contact area, to avoid slippage. Below you can find a sketch of a couple of two extra pulleys I am thinking of implementing, in order to achieve higher contact area for mylar and/or thread as belt material. The question is whether there is a way to eliminate the forces on the platter main bearing, although I assume that the bottom pulley (G) will assume some of those forces.
Thoughts, please?
the ratio between speed and torque constants was mentioned by a friend, who has experience with Maxon motors. But his comment
"The relation from speed-constant (Ks) to torque-constant (Kt) is cruical for the function of the speed regulation- it should be as low as possible.
Maxon 226764 is possibly the best in this respect." was actually referring to the "negative impedance controller", originally proposed by Bruce Trump. I do not know whether that applies to the OL controller, too.
From my side, I've left the OL controller with the new 6,800μF Nichicon cap playing, so that the cap can form.
In the meantime, I have preparing to test various drivetrain approaches. Part from the rim drive, with respect to belt-drive, I have recently received Mylar tape (5mm width) and also polyester thread. It's so thin, you can hardly see it.
Last but not least, taking inspiration from Niffy's drivetrain as well as from Artemis Labs, too, the belt drive approach is related to the friction coefficient of the belt. As a rule of thumb, elastic belts have higher friction coefficient (and thus require minimal contact area), while other materials (e.g. mylar or thread) have lower friction coefficient, thus requiring higher contact area, to avoid slippage. Below you can find a sketch of a couple of two extra pulleys I am thinking of implementing, in order to achieve higher contact area for mylar and/or thread as belt material. The question is whether there is a way to eliminate the forces on the platter main bearing, although I assume that the bottom pulley (G) will assume some of those forces.
Thoughts, please?
Attachments

@pkonstantinidis
Hey Panos,
Great drawings… Well done!
The last drawing, with the opposing pulley , makes good sense to me.
It retains plenty of sub-platter contact to minimise low-stretch belt slip, but also spreads the bearing load in two opposing directions to minimise platter tilt. Nice.
I imagine, the closer the two motor-side idlers are to each other, the better.
Have you considered running small flywheels on the idlers to increase inertia and increase vibration smoothing?
My first choice would still be a “vector” triangle of three pulleys driving a barely-tight silicone belt. That’s just me.
As an aside, I just managed to measure the now redundant NICHICON 1,000uF capacitor, removed from the OL SCU pcb. It measures around 825uF which is not too shabby. Perhaps the ESR has crept-up to unacceptable levels for the OL circuit, but I can’t test for ESR yet.
Interesting - and a bit surprising - I thought.
Hey Panos,
Great drawings… Well done!
The last drawing, with the opposing pulley , makes good sense to me.
It retains plenty of sub-platter contact to minimise low-stretch belt slip, but also spreads the bearing load in two opposing directions to minimise platter tilt. Nice.
I imagine, the closer the two motor-side idlers are to each other, the better.
Have you considered running small flywheels on the idlers to increase inertia and increase vibration smoothing?
My first choice would still be a “vector” triangle of three pulleys driving a barely-tight silicone belt. That’s just me.
As an aside, I just managed to measure the now redundant NICHICON 1,000uF capacitor, removed from the OL SCU pcb. It measures around 825uF which is not too shabby. Perhaps the ESR has crept-up to unacceptable levels for the OL circuit, but I can’t test for ESR yet.
Interesting - and a bit surprising - I thought.
Hey Sondeknz,
I think that silicon-based belts, and all other belts with high friction coefficient, do not require 'a lot' of contact area to ensure sufficient torque transfer. Have you considered using two silicone belts (instead of just one) with minimal tension?
On the contrary, mylar tape and polyester thread, require maximum possible contact area with the subplatter. IMO the critical point is the motor pulley, which by definition has a small circumference. With the two pulleys on the left, I am trying to maximize the contact area for the motor pulley and for the subplatter, too. The pulley at the right is -as you said- for reducing the lateral force on the platter main bearing.
Your finding about the capacitance of the 1000μF cap is quite interesting. My interpretation is that the nominal capacitance of 1,000μF may be barely enough to provide a smooth motor operation. Hence, the upgrade to a much higher value has been so beneficial for anyone who has tried it (you and me, definitely).
I think that silicon-based belts, and all other belts with high friction coefficient, do not require 'a lot' of contact area to ensure sufficient torque transfer. Have you considered using two silicone belts (instead of just one) with minimal tension?
On the contrary, mylar tape and polyester thread, require maximum possible contact area with the subplatter. IMO the critical point is the motor pulley, which by definition has a small circumference. With the two pulleys on the left, I am trying to maximize the contact area for the motor pulley and for the subplatter, too. The pulley at the right is -as you said- for reducing the lateral force on the platter main bearing.
Your finding about the capacitance of the 1000μF cap is quite interesting. My interpretation is that the nominal capacitance of 1,000μF may be barely enough to provide a smooth motor operation. Hence, the upgrade to a much higher value has been so beneficial for anyone who has tried it (you and me, definitely).
@pkonstantinidis
“Have you considered using two silicone belts (instead of just one) with minimal tension?”
Unless there is another pulley somewhere, I don’t see the benefit of adding a second belt.
If I had a second pulley on the opposite side of the sub-platter, that would mitigate the current belt pull on the main bearing - a great idea - but I would still only run one belt to ensure balanced belt tension.
Three pulleys would be better still, to creat a “Vector” drive configuration.
I wish I knew where I could buy such mountable belt-pulleys.
Do you have any ideas?
“Have you considered using two silicone belts (instead of just one) with minimal tension?”
Unless there is another pulley somewhere, I don’t see the benefit of adding a second belt.
If I had a second pulley on the opposite side of the sub-platter, that would mitigate the current belt pull on the main bearing - a great idea - but I would still only run one belt to ensure balanced belt tension.
Three pulleys would be better still, to creat a “Vector” drive configuration.
I wish I knew where I could buy such mountable belt-pulleys.
Do you have any ideas?
Hi Sondeknz,
the reason I proposed to consider a second silicone belt is based on the assumption that a minimal tension belt may -at some point- have a minute slippage. I would think that a second minimal tension belt might not present slippage at that very moment, too. Just an idea -))
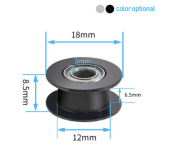
You can easily find pulleys on Aliexpress. That's where I got mine from. https://www.aliexpress.com/item/328....order_list.order_list_main.24.3e3018028sYfAo You can choose the type you prefer.
the reason I proposed to consider a second silicone belt is based on the assumption that a minimal tension belt may -at some point- have a minute slippage. I would think that a second minimal tension belt might not present slippage at that very moment, too. Just an idea -))
You can easily find pulleys on Aliexpress. That's where I got mine from. https://www.aliexpress.com/item/328....order_list.order_list_main.24.3e3018028sYfAo You can choose the type you prefer.
Attachments
Thanks Panos.
I now see a whole new project ahead of me… building my own DIY VECTOR DRIVE!
[The challenge will be drilling the stainless steel top-plate at home…]
No need for a second belt. There is absolutely zero slip with a shiny new LINN KAROUSEL sub-platter and a very clingy silicone belt.
In fact, the almost drop-off loose silicone blue belt clings so well, I have to be careful flipping LP sides while the platter is still running; the belt just does not allow any slip whatsoever!
I now see a whole new project ahead of me… building my own DIY VECTOR DRIVE!
[The challenge will be drilling the stainless steel top-plate at home…]
No need for a second belt. There is absolutely zero slip with a shiny new LINN KAROUSEL sub-platter and a very clingy silicone belt.
In fact, the almost drop-off loose silicone blue belt clings so well, I have to be careful flipping LP sides while the platter is still running; the belt just does not allow any slip whatsoever!
Origin Live sell a couple of different pulleys, a short one and a long one that looks like the metal one from your photo. The current OL pulleys are made from plastic, I believe that they are Delrin. They cost around £30 plus postage.This would just leave the pulley issue to resolve!
- Home
- Source & Line
- Analogue Source
- 12VDC motor for the turntable. Power, torque, PCB questions