Member
Joined 2019
Panayotis Kritidis
Thanks for the videos! My questions were intended to find out how you solve these problems so I may learn it from you.
In reality, eccentricity is inevitable. The pivot of your arm will have small movements not only in vertical plane but also in lateral plane as well. The water will cause the “boat” swing up or down on both ends of the “boat”. It will cause azimuth changes. So, my main question is about the role of the water playing.
Does water provide statable support for the arm? Does water provide a precision guiding mechanism? Is water frictionless? The answers for these questions are all no’s due to the nature of water. So, why water?
On a regular mechanical linear arm, the rail acts both support for the arm and guiding mechanism. On your arm, these two functions are separated. Water acts as support base only. The frictions on your arm are combinations of the water friction and the friction of guiding wheels. Is the combination of frictions better than a regular mechanical linear arm such as Niffy’s arm? I can’t tell, but I highly doubt it will be better.
Jim
Thanks for the videos! My questions were intended to find out how you solve these problems so I may learn it from you.
In reality, eccentricity is inevitable. The pivot of your arm will have small movements not only in vertical plane but also in lateral plane as well. The water will cause the “boat” swing up or down on both ends of the “boat”. It will cause azimuth changes. So, my main question is about the role of the water playing.
Does water provide statable support for the arm? Does water provide a precision guiding mechanism? Is water frictionless? The answers for these questions are all no’s due to the nature of water. So, why water?
On a regular mechanical linear arm, the rail acts both support for the arm and guiding mechanism. On your arm, these two functions are separated. Water acts as support base only. The frictions on your arm are combinations of the water friction and the friction of guiding wheels. Is the combination of frictions better than a regular mechanical linear arm such as Niffy’s arm? I can’t tell, but I highly doubt it will be better.
Jim
Member
Joined 2019
Member
Joined 2019
Hi, super10018. Our discussion goes on!
1. I already posted a clip showing the very low level of the boat vertical movements: ±0.03 mm caused by cartridge movements of ±0.21 mm. I do not see any azimuth problem with those ±0.03 mm, given that ±0.21 mm, causing 7 times higher deviations of the tonearm from the horizontality, which are already very low: ±0.06° (the effective length of my tonearm is 200 mm).
Now about the lateral movements: any type of well working tangential tonearm will have the same behavior, in it's 'effort' to preserve the tangentiality. So, these small deviations are, in my opinion, a sign of system 'health'.
2. Water provides only the ability of smooth, noiseless and very light movement (the water friction for this size of boats is actually below 1 dyne). The linearity of the movement is provided by the leading wheels: polished plexiglass on flat glass. As about your "no"s for the water properties: it is not necessary to have some parameter equal to 0 in order to accept a case. The parameter may be enough small ("enough" has to be justified) and the case is acceptable.
3. I will read what is available about the "Niffy’s arm" and answer you. A general criterion is the level of the lateral frictional and dynamic forces acting on the stylus during the disk playback. They should be quite (several times) lower than the uncertainties related to the antiskating adjustment in a conventional tonearm. We know that a precise neutralization of the lateral skating component is not possible due to the dependence of the skating force on the groove modulation level. The uncertainty of this origin is of the order 100 dyn, so a reasonable tangential tonearm has to be as 'light' as several tens of dynes or less.
1. I already posted a clip showing the very low level of the boat vertical movements: ±0.03 mm caused by cartridge movements of ±0.21 mm. I do not see any azimuth problem with those ±0.03 mm, given that ±0.21 mm, causing 7 times higher deviations of the tonearm from the horizontality, which are already very low: ±0.06° (the effective length of my tonearm is 200 mm).
Now about the lateral movements: any type of well working tangential tonearm will have the same behavior, in it's 'effort' to preserve the tangentiality. So, these small deviations are, in my opinion, a sign of system 'health'.
2. Water provides only the ability of smooth, noiseless and very light movement (the water friction for this size of boats is actually below 1 dyne). The linearity of the movement is provided by the leading wheels: polished plexiglass on flat glass. As about your "no"s for the water properties: it is not necessary to have some parameter equal to 0 in order to accept a case. The parameter may be enough small ("enough" has to be justified) and the case is acceptable.
3. I will read what is available about the "Niffy’s arm" and answer you. A general criterion is the level of the lateral frictional and dynamic forces acting on the stylus during the disk playback. They should be quite (several times) lower than the uncertainties related to the antiskating adjustment in a conventional tonearm. We know that a precise neutralization of the lateral skating component is not possible due to the dependence of the skating force on the groove modulation level. The uncertainty of this origin is of the order 100 dyn, so a reasonable tangential tonearm has to be as 'light' as several tens of dynes or less.
Member
Joined 2019
1. I already posted a clip showing the very low level of the boat vertical movements: ±0.03 mm caused by cartridge movements of ±0.21 mm. I do not see any azimuth problem with those ±0.03 mm, given that ±0.21 mm, causing 7 times higher deviations of the tonearm from the horizontality, which are already very low: ±0.06° (the effective length of my tonearm is 200 mm).
It is highly undesirable to have vertical movements on the bearing even it is within ±0.03 mm. A pivot arm has two basic standards that all the good linear arm should follow. These standards are a stiff bearing and frictionless. A good mechanic linear arm can’t completely be frictionless, but at least should have a stiff bearing and no movements in the vertical plane.
Vertical movements have nothing to do with azimuth, but lateral movements do.
Now about the lateral movements: any type of well working tangential tonearm will have the same behavior, in it's 'effort' to preserve the tangentiality. So, these small deviations are, in my opinion, a sign of system 'health’.
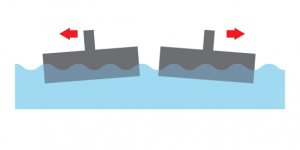
No. Not any type of linear arms will have the same behavior as water floating linear arm. Once an eccentric record pulls or pushes the boat, the boat will behave as I indicated in the image because of the nature of water. It may affect azimuth. For regular mechanical linear arm, such unwanted movements don’t exist.
2. Water provides only the ability of smooth, noiseless and very light movement (the water friction for this size of boats is actually below 1 dyne). The linearity of the movement is provided by the leading wheels: polished plexiglass on flat glass. As about your "no"s for the water properties: it is not necessary to have some parameter equal to 0 in order to accept a case. The parameter may be enough small ("enough" has to be justified) and the case is acceptable.
In my opinion, water doesn't provide smooth movements. Its friction is way too high. The other water linear arm is different from yours because the water is a part self-correct mechanism. Although the other water linear arm is very cleverly designed, I am not fond of that arm. In theory, it has a lot of problems. It has the same problems with the bearing as yours. However, the water on your arm functions as a supporting base for the arm only. If the other water linear arm has a convincible reason to use water, I fail to see the same thing on your arm.
Attachments
Last edited:
Member
Joined 2019
It is highly undesirable to have vertical movements on the bearing even it is within ±0.03 mm.
1. What is undesirable for a metal-to-metal bearing may be allowable for solid-to-liquid.
2. As long as 0 air (luft) bearings do not exist, what is the "desirable" luft according to you?
Not any type of linear arms will have the same behavior as water floating linear arm. Once an eccentric record pulls or pushes the boat, the boat will behave as I indicated in the image because of the nature of water. It may affect azimuth. For regular mechanical linear arm, such unwanted movements don’t exist.
Again the problem of missing estimates.. I agree with you generally, but if the azimuth deviations are acceptably low, it's OK with me. What could be acceptably low? Maybe 0.5 degree? Why this value? Because it is practically very difficult to adjust the cartridge azimuth with accuracy higher than 0.5 degree. Given the magnitude of the lateral force - several tens of μm and the mass of the floating tonearm - nearly 30 g - I suspect that the angular deviation of the boat will be less than 0.5 o. But before I make some calculations, I will try to capture this deviations with my digital microscope and will post the result.
In my opinion, water doesn't provide smooth movements. Its friction is way too high.
Well, I have made repeatedly deceleration measurements showing that in the region of stylus working lateral velocities (0.1 - 0.2 mm/s) the water resistance to my boat is lower than 1 dyn. If you call this value "too high", we would never reach some agreement.
Finally, I need to remind that the basic idea of the tonearm is not mine, but of the Russian engineer Nicolay Ivanov. In this sense the tonearm TTT is just 'my version" of Ivanov's idea, not "mine".
Member
Joined 2019
Member
Joined 2019
The world of dogmatic perfectionism is full of surprises.
In my last digital microscopy clip I show that TTT boat azimuth deviations resulting from a lateral eccentricity oscillation of ±0.46 mm equal ±0.017o . For those who may comment that 0o is better than 0.017o , I got some bad news.
Let's consider a disk with vertical warps of ±0.21 mm - a quite usual value - at the initial LP groove radius 143 mm. This will result in disk deviations from the horizontality equal to arcsin(0.21/143) = 0.084o. What a bad disk behavior... Our ideal geometry tonearm has 0o azimuth deviations, but the disk has some, so the azimuth error, which is a "mutual" disk/tonearm story, is 5 times higher that the bad TTT one of 0.017o....
Note: this effect will be present in all types of tonearms, the good and the bad ones.
")
Last edited:
Member
Joined 2019
Last edited:
Sorry, I don't mean to be a party crasher. But the deeper I dig, the more problems I find with the arm.
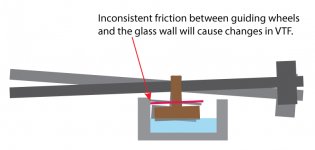
Another problem with the arm is its various VTF. Inconsistent friction between guiding wheels and the glass wall will cause changes in VTF. Please see the image.
Another problem with the arm is its various VTF. Inconsistent friction between guiding wheels and the glass wall will cause changes in VTF. Please see the image.
Attachments
Member
Joined 2019
Another problem with the arm..
I posted detailed answers to your previous "problems" and I did not get any reply on them. You use the word "another" as if your previous "problems" are still unanswered!
If I continue the discussion in this manner, I will have either to violate the forum rules - what I will not do - or to neglect one of my major academic principles - the attention to the experimental data and their superiority on any theoretical statement contradicting them.
Therefore - goodbye. I don't think you will find another university professor ready to follow your discussion "rules".
Last edited:
The foundation of the arm is water and not a stable platform.
When a bass transient comes along, how does water react , does it not vibrate and move your platform ?
You might not see it, but it’s there.
Low frequency waves are moving your water platform unlike a rigid fixed mount gimbal or similar low friction arm bearing that has a mass resistance coupled to the moving platter center that will not move. You just made it easy to vary that relationship
I get it that it makes a sound, but an unstable pivot point in constant flux is not a bonus feature. The wheels don’t make it rigid with water underneath, Sshh !
Rube Goldberg is still alive and well
Gone fishin
David
When a bass transient comes along, how does water react , does it not vibrate and move your platform ?
You might not see it, but it’s there.
Low frequency waves are moving your water platform unlike a rigid fixed mount gimbal or similar low friction arm bearing that has a mass resistance coupled to the moving platter center that will not move. You just made it easy to vary that relationship
I get it that it makes a sound, but an unstable pivot point in constant flux is not a bonus feature. The wheels don’t make it rigid with water underneath, Sshh !
Rube Goldberg is still alive and well
Gone fishin
David
Member
Joined 2019
When a bass transient comes along, how does water react , does it not vibrate and move your platform ? You might not see it, but it’s there.
1. The water will vibrate slightly, this way absorbing part of the tonearm's vibration and sending less of the bass burst back to the cartridge.
2. I surely will not see it, but maybe I will also not HEAR it? And if so, where is the problem?
3. I think that this Holy Dogma of the tonearm basis rigid with respect to the disk center has to be considered in the sense of it's AIM. Why rigid? Because {something A related to the reproduction quality} and {something B related to the reproduction quality} etc. If a non-rigid design satisfies A, B etc., then I see no reason to stick to the Dogma.
4. Is the Dogma violated in the case of unipivot tonearm? Is it in the case of the Maglev turntable? Is a 50 microns tolerance in a air bearing tonearm OK with the Dogma?
5. Considering the water, we must not forget it's surface tension property, which damps vibrations quite effectively.
Member
Joined 2019
An analysis of another Dogma.
The Dogma: the tracking force should be constant.
The reality: vertical disk warps of ±0.5 mm may result in dynamic variations of the tracking force up to 30 dyne for equivalent tonearm mass of 15 g. For heavier tonearms and higher/sharper warps, the variation peaks of the stylus force may exceed 100 dyne.
Therefore, the Dogma has to be replaced with another two:
1. The vertical disk warps should be minimized (use of central and peripheral stabilizers).
2. The cartridge has to tolerate variations of the tracking force of the order of 100 dyne with no audible artefacts.
The Dogma: the tracking force should be constant.
The reality: vertical disk warps of ±0.5 mm may result in dynamic variations of the tracking force up to 30 dyne for equivalent tonearm mass of 15 g. For heavier tonearms and higher/sharper warps, the variation peaks of the stylus force may exceed 100 dyne.
Therefore, the Dogma has to be replaced with another two:
1. The vertical disk warps should be minimized (use of central and peripheral stabilizers).
2. The cartridge has to tolerate variations of the tracking force of the order of 100 dyne with no audible artefacts.
Member
Joined 2019
Nice project Panayotis.
1) What is the advantage of horizontal guiding wheels ? If wheels are vertical we can remove the boat and have less friction ?
2) Is magnet necessary to hold the wheels against the wall ? Wouldn't Stylus drag keep the wheels in touch with the wall ?
3) Would a curved bottom surface of the boat lower the friction ? it will have less contact with water.
Thanks for sharing and regards.
1) What is the advantage of horizontal guiding wheels ? If wheels are vertical we can remove the boat and have less friction ?
2) Is magnet necessary to hold the wheels against the wall ? Wouldn't Stylus drag keep the wheels in touch with the wall ?
3) Would a curved bottom surface of the boat lower the friction ? it will have less contact with water.
Thanks for sharing and regards.
- Home
- Source & Line
- Analogue Source
- Floating Tangential Tonearm