Or even simpler put, a three gain stage amplifier is very difficult to compensate and stabilize. Cherry compensation used in PGP is the only notable exception that I am aware of.
NE5532/5534 is a decades old three stage gain op amp ,
perfectly stable , and hardly the only one....
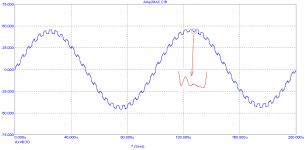
Edmond, sine wave at near pk - pk output with much higher F square wave at much lower bevel superimposed on top? Neat test!
It's easy to forget just how much some parameters move around with voltage and how this can lead to instability , especially near full output voltage swings.
It's easy to forget just how much some parameters move around with voltage and how this can lead to instability , especially near full output voltage swings.
SQ test
Hi Andrew,
A neat test, indeed. Courtesy of Glen Kleinschmidt (AFAIK, he is the inventor).
The other square wave test, the one at start-up (fig.12q), rings still to much at low supply voltages.
This has all to do with the pre-driver, which still has to be improved.
Cheers,
E.
Edmond, sine wave at near pk - pk output with much higher F square wave at much lower bevel superimposed on top? Neat test!
It's easy to forget just how much some parameters move around with voltage and how this can lead to instability , especially near full output voltage swings.
Hi Andrew,
A neat test, indeed. Courtesy of Glen Kleinschmidt (AFAIK, he is the inventor).
The other square wave test, the one at start-up (fig.12q), rings still to much at low supply voltages.
This has all to do with the pre-driver, which still has to be improved.
Cheers,
E.
"Scroggie", once editor of WW, attributes this test (small square wave superimosed on large LF sine wave) to RC Bowes (WW Dec 1962).
Brian.
Brian.
Thanks Brian. I will change the name to 'R.C. Bowes stability test'.
Credit where credit is due.
Cheers,
E.
Credit where credit is due.
Cheers,
E.
Dave totally agree regarding Bode.
I have the thirteenth printing fairly dog-eared, and indeed inspiring.
Thanks
-Antonio
In order to find more instabilities, I've also performed the 'Glen Kleinschmidt stability test', which does show some ringing near clipping levels, though not really alarming. See below.
Cheers,
E.
Inspired by Bode I ask Edmond😉
Have you considered (or tried at any time) to use "Bode step" in the feedback loop? That is, to flatten the response just above the Unity Crossover frequency to improve the phase? Despite the impeccable source it doesn't seem to be widely used in audio. Used by NASA in spacecraft control systems so it's real rocket science (invented for the phone company back in the tube era sounds less impressive).
Best wishes
David
BTW Antonio. I lived in SanFran. when I was in the USA. Nice place
Last edited:
the text I used to learn to apply describing function Popov/Circle tests for nonlinear stability was
“Nonlinear System Analysis and Synthesis: Vol 2 – Techniques and Applications” Ramanth, Hedrick, Payntner eds. 1980
Taylor’s chapter was one of the (few) useful ones: http://www.ece.unb.ca/jtaylor/Publications/asme_absol_stab.pdf if that does it for you there’s no need to find the book
This requires the nonlinearity be separable into a “Lurie Problem” block diagram with the amp’s frequency response in a SISO transfer function (different Lurie)
Slew limit is just a scalar amplitude limit on the (error) signal driving a integrator
“Nonlinear System Analysis and Synthesis: Vol 2 – Techniques and Applications” Ramanth, Hedrick, Payntner eds. 1980
Taylor’s chapter was one of the (few) useful ones: http://www.ece.unb.ca/jtaylor/Publications/asme_absol_stab.pdf if that does it for you there’s no need to find the book
This requires the nonlinearity be separable into a “Lurie Problem” block diagram with the amp’s frequency response in a SISO transfer function (different Lurie)
Slew limit is just a scalar amplitude limit on the (error) signal driving a integrator
Stability Test
Hello Edmond
Was this test done into 2 ohms, my opinion is that this is the best load to stress an amps stability with.
Regards
Arthur
In order to find more instabilities, I've also performed the 'Glen Kleinschmidt stability test', which does show some ringing near clipping levels, though not really alarming. See below.
Cheers,
E.
Hello Edmond
Was this test done into 2 ohms, my opinion is that this is the best load to stress an amps stability with.
Regards
Arthur
the text I used to learn to apply describing function Popov/Circle tests for nonlinear stability was...
You use the non-linear tests for stability when slew rate limited or clipped?
So if I have sufficient headroom in volts and slew I don't need to hurt my head to learn this?
Best wishes
David
Thanks Brian. I will change the name to 'R.C. Bowes stability test'.
Credit where credit is due.
Cheers,
E.
Along similar lines, Self gives Glen (GK) credit for paralleled VAS devices when
it was done here as early as 1992 as seen in Figure 35:
http://www.diyparadiso.com/datasheets/anpoweramp.pdf
I've been meaning to inform Self about this, I should send him an email.
I've also had the idea of using multiples since there does not seem to be an ideal
VAS device in many applications where high Ic or Pd is required along with low capacitance.
You use the non-linear tests for stability when slew rate limited or clipped?
So if I have sufficient headroom in volts and slew I don't need to hurt my head to learn this?
Best wishes
David
you 1st have to have a Nyquist "conditionally stable" system - the Bode plot of the loop gain/return difference has to dip below the 0 degree phase shift line - requires a region of 3rd order loop gain slope while there is still gain, before the unity gain intercept
the phase curve will dip, then partially recover as the gain curve necessarily reduces in slope approaching the unity gain intercept so that the nominal linear stabitiy requirement is met with some safety margin
if you use dominant pole comp or even two-pole or TMC you really only have to worry about linear stability margins
and yes if you have enough slew rate then the amp output will clip against the supply rails before the slew limit region can "run" for long enough to give sufficient describing function gain reduction to cause the phase dip to matter
of course even "unconditionally stable" systems can change perversley enough when clipping that "rail sticking" and even short oscillation burst occur coming out of saturation with 2-pole comp - but these "describing function" classes of self sustaining nonlinear large signal oscillation should be ruled out unless you go 3rd order
Last edited:
Re😛aralleled VAS devices.
ETI Australia published an article for building a 60W Amp module using // BD139 as the VAS.Trevor Marshall was credited with the design. Issue was May 1979. The implementation of the output zobel is interesting. I built a pair in '79, was pleased with the results.
Cheers,
Steve.
ETI Australia published an article for building a 60W Amp module using // BD139 as the VAS.Trevor Marshall was credited with the design. Issue was May 1979. The implementation of the output zobel is interesting. I built a pair in '79, was pleased with the results.
Cheers,
Steve.
Hello Edmond
Was this test done into 2 ohms, my opinion is that this is the best load to stress an amps stability with.
Regards
Arthur
Hi Arthur,
The test was done with a load of 4 Ohms.
Whether 4 or 2 Ohms, it doesn't hardly make any difference.
Below the 'Bowes test' with 2 Ohms.
With a disabled TMC, the ringing was almost completely gone.
Cheers,
E.
edit: NB: Equally interesting (and important!) is the step response during the firing up phase.
See fig. 12q on my website.
Attachments

Last edited:
Re😛aralleled VAS devices.
ETI Australia published an article for building a 60W Amp module using // BD139 as the VAS.Trevor Marshall was credited with the design. Issue was May 1979. The implementation of the output zobel is interesting. I built a pair in '79, was pleased with the results.
Cheers,
Steve.
I did not expect that the 1992 article was the first time, just that it was many years before GK. Self does simply say that it was pointed out to him by GK but it is rather obvious and to give credit suggests that it was something new and innovative.
It is not too clear exactly where the gain probe is for Fig.12c.
For Fig.12b text should read "base" of Q12 not "basis"...
For Fig.17 make "correction" of "corection"
No comment re. earlier query on Bode step?
Best wishes
David
The same applies to michaelkiwanuka, who, most likely, made a stupid remark again.
Which 'stupid remark' have i made you ignorant fool?
This front end that you call yours is in fact due to a japanese designer, and can't be compensated by minor loop means such as two pole so-called TMC or ordinary Miller compensation.
So please, stop misleading the ignorant and ill-informed with your nonsense.
Waly is right about you.🙁
You're totaly right about Edmond.Have you built any of Edmond's ideas to confirm they are more than theoretical speculations, based purely on simulations using models of an unknown quality, and with ideally matched devices?
Speaking of theory, you may want to read the control theory bibliography recommended by jcx. You'll find out that all systems with the same number of degrees of freedom are (feedback wise) equivalent. Lurie concluded that given an open loop characteristic, and the same number of degrees of freedom, there is no silver bullet to increase the loop gain while keeping the same stability margins. If you can linearize the open loop system, that's fine, but otherwise embedding loops in loops in loops... won't help a iota. And systems with three degrees of freedom or more are of little practical importance, at least for discrete audio.
Not negative, just trying to keep things within the common knowledge and sense. Each time I see something like 12ppb (let's see, that's 0.0000012%) THD-20 performances I got itches.
Sorry for "trolling" again, I'm still not used to the fact that discussing design ideas is not Edmonds strongest trait, unless you start your message with "You are a Genius!".
One thing though: what Edmond would have us beleive are his circuits are invariably nothing of the sort: he simply obtains them from the web and elsewhere and pretends to have come up with them independently.🙁
A picture is worth a thousand words
Hi David,
You're right, it's not that clear. I've changed the caption in:
Fig.12c. Output gain and phase response. Look here to see how and where the gain probe has been put.
Cheers,
E.
It is not too clear exactly where the gain probe is for Fig.12c.
Hi David,
You're right, it's not that clear. I've changed the caption in:
Fig.12c. Output gain and phase response. Look here to see how and where the gain probe has been put.
Done.For Fig.12b text should read "base" of Q12 not "basis"...
For Fig.17 make "correction" of "corection"
Not yet, if you don't mind. 😉 I was rather busy with purchasing components.No comment re. earlier query on Bode step?
Best wishes
David
Cheers,
E.
New?
Let's return to my first question on page 1: Has anyone seen this front-end before and let's summarize the response:
post 15, PChi: A complementary differential input stage, though with a conventional TIS.
post 16, myhrrhleine: The Hawksfords cascode. Same principle of base current recycling, though differently implemented.
post 53, Stein: A bootstrapped super pair.
post 74, KSTR: a TIS gain of just 1x, though the freq. compensation is totally different.
post 106, David: AD797, Folded cascode
post 112, Steven. Jamaha, Baxandall super pair, though the rest is fairly traditional.
post 130, GK: This one comes close, though another cascode and unspecified compensation.
post 137, Mike KS: Evolve power amp. This one comes close too. It has input inclusive compensation and a low gain cascoded TIS, though no base current recycling.
post 179, Walter: Comes close. Has input inclusive compensation and a low gain cascoded TIS, though no base current recycling.
post 180, Walter: Comes very close. Does base current recycling and TMC.
post 184, Stein: This one comes very close, though compensation not specified.
In case I forgot someone to mention, please accept my apologies.
What we see is that almost every detail has been published before, though mostly together with other (more traditional) techniques. The circuits mentioned by Walter and Stein come closest, but not completely, as there's no PLIL compensation and no pre-driver with bootstrapped collectors.
As always with so called 'new' circuits, most details -or sometimes every detail- in isolation or partly in combination, were already know and published. This also appears to be the case with the SuperTIS. That's nice, because it reinforces my believe that it will work in real life too.
Cheers,
E.
Let's return to my first question on page 1: Has anyone seen this front-end before and let's summarize the response:
post 15, PChi: A complementary differential input stage, though with a conventional TIS.
post 16, myhrrhleine: The Hawksfords cascode. Same principle of base current recycling, though differently implemented.
post 53, Stein: A bootstrapped super pair.
post 74, KSTR: a TIS gain of just 1x, though the freq. compensation is totally different.
post 106, David: AD797, Folded cascode
post 112, Steven. Jamaha, Baxandall super pair, though the rest is fairly traditional.
post 130, GK: This one comes close, though another cascode and unspecified compensation.
post 137, Mike KS: Evolve power amp. This one comes close too. It has input inclusive compensation and a low gain cascoded TIS, though no base current recycling.
post 179, Walter: Comes close. Has input inclusive compensation and a low gain cascoded TIS, though no base current recycling.
post 180, Walter: Comes very close. Does base current recycling and TMC.
post 184, Stein: This one comes very close, though compensation not specified.
In case I forgot someone to mention, please accept my apologies.
What we see is that almost every detail has been published before, though mostly together with other (more traditional) techniques. The circuits mentioned by Walter and Stein come closest, but not completely, as there's no PLIL compensation and no pre-driver with bootstrapped collectors.
As always with so called 'new' circuits, most details -or sometimes every detail- in isolation or partly in combination, were already know and published. This also appears to be the case with the SuperTIS. That's nice, because it reinforces my believe that it will work in real life too.
Cheers,
E.
- Status
- Not open for further replies.
- Home
- Amplifiers
- Solid State
- Has anyone seen this front-end before?