Alright. Its that time again where information and knowledge is such that even if you read multiple books and articles, you are left with more questions than answers, which in a way defeat the purpose... LOL
As the header explain, this thread is about 1st order xover and drivers, specifically: Driver compliance such that it will work with a 1st order crossover network.
I have read comments made by different engineers regarding the good and the bad about 1st order filters and that in most cases its about the drivers ability to cope with the gentle -6 dB slope a 1st order filter present. To make this debate a fair bit easier, we will apply a rule:
Whether a speaker driver sounds good or not is largely a personal perspective and is not the target for this debate - mostly due to the absence of objective perspective. Just like you, I too have preferences 🙂
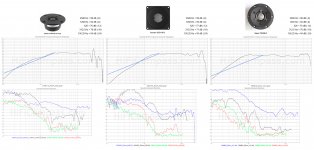
I will use tweeters to kickstart this debate and have provided an image with 3 different tweeters. There is one aluminium, one ceramic and one beryllium tweeter. Each tweeter is presented with its frequency response (on axis), harmonic distortion aligned to the freq.resp chart and in blue, the virtual 1st order slope with xover target sat to 2500 Hz.
So what is my question you might ask, well, it is this:
I will assume that 1st order compliance and the "rule" behind how it handles the -6dB slope has a linear relationship. As such that for a midrange, the mirrored slope is applied at the top end. Here cone breakup place a much larger role than for the tweeter, so I am aware of this and if such is important for the definition, do add that information.
I guess that is it for this entry, I hope people here at diyaudio.com has some answers to clarify the issues I have.
PS: The measurement plots comes from hificompass.com and I'd like to say thank you and I hope you are not upset because I used them 🙂
As the header explain, this thread is about 1st order xover and drivers, specifically: Driver compliance such that it will work with a 1st order crossover network.
I have read comments made by different engineers regarding the good and the bad about 1st order filters and that in most cases its about the drivers ability to cope with the gentle -6 dB slope a 1st order filter present. To make this debate a fair bit easier, we will apply a rule:
All speaker drivers have the same electro-mechanical to sound pressure function: To compress the air in front of it in order to generate sound waves. The ability to generate low or high frequency's depend on cone area (Sd), motor strength (Bl or force), the voice coil and cone's ability to move with no distortion (Xmax) and maximum physical excursion of the driver before physical damage (Xmech). All speaker drivers have specific frequency areas they can reproduce before distortion is introduced. There are two types of distortion. Linear and non linear. The term linear distortion, which might sound rather confusing, implies that the output signal has the same frequency content as the input signal. In this distortion, it is the amplitude and/or phase of the output signal that is distorted. In contrast, the term nonlinear distortion suggests that the output signal contains frequency components that are absent in the input signal. This means that the energy is transferred from one frequency at the input to several frequencies at the output.
Whether a speaker driver sounds good or not is largely a personal perspective and is not the target for this debate - mostly due to the absence of objective perspective. Just like you, I too have preferences 🙂
I will use tweeters to kickstart this debate and have provided an image with 3 different tweeters. There is one aluminium, one ceramic and one beryllium tweeter. Each tweeter is presented with its frequency response (on axis), harmonic distortion aligned to the freq.resp chart and in blue, the virtual 1st order slope with xover target sat to 2500 Hz.
So what is my question you might ask, well, it is this:
We can by looking at the freq.resp and distortion plot tell that the degree of flatness or neutrality differ between them, also when and how severe the cone breakup is. I have not included the Fs for these drivers if this matters, but that is easily done.If we use the 3 tweeters provided, how does one see or tell without listening if it can deal with a 1st order crossover network ?
I will assume that 1st order compliance and the "rule" behind how it handles the -6dB slope has a linear relationship. As such that for a midrange, the mirrored slope is applied at the top end. Here cone breakup place a much larger role than for the tweeter, so I am aware of this and if such is important for the definition, do add that information.
I guess that is it for this entry, I hope people here at diyaudio.com has some answers to clarify the issues I have.
PS: The measurement plots comes from hificompass.com and I'd like to say thank you and I hope you are not upset because I used them 🙂
Attachments
Have you verified excursion and power handling of those drivers for your design? Looks to me that you have 4 flat tires.
Have you verified excursion and power handling of those drivers for your design? Looks to me that you have 4 flat tires.
OBS: My question is not driver specific. It has to do with all drivers. I thought I was specific about this. Why does everything need to be design specific for people to answer. This is kinda exactly what I am getting at, as such that the 1st order and driver relationship cannot be answered unless drivers of the system has been selected - aka its all a big mystery and everyone is winging it... LOL
What exactly according to you is "flat tires" ?Looks to me that you have 4 flat tires.
OBS: My question is not driver specific. It has to do with all drivers. I thought I was specific about this. Why does everything need to be design specific for people to answer. This is kinda exactly what I am getting at, as such that the 1st order and driver relationship cannot be answered unless drivers of the system has been selected - aka its all a big mystery and everyone is winging it... LOL
What exactly according to you is "flat tires" ?
Your 1st post specifically asks about those three drivers.
You have to verify if the driver can handle the excursion and power. Artsy fartsy audiophoolery can't overcome physics.
Your 1st post specifically asks about those three drivers.
You have to verify if the driver can handle the excursion and power. Artsy fartsy audiophoolery can't overcome physics.
I wrote and I quote:
If no drivers are needed in order to shed light on the matter, then ignore the 3 i provided. They where chosen due to difference in cone material, freq.resp and harmonic distortion.I will use tweeters to kickstart this debate and have provided an image with 3 different tweeters.
You have still not answered the question about "flat tires" - I'd appreciate it if you could provide information.
Acting all mysterious, I know something you don't etc is exactly what I want to avoid.
Excursion can be found via:
So, are you saying that 1st order and driver compliance has to do with driver excursion only ?p=Sd*Xmax*f^2*pi*rho0/(r*sqrt(2))
where
p=sound pressure in Pa
Sd=eqv. piston area in m^2
Xmax=max peak excursion in m
f=frequency in Hz
rho0=1.2kg/m^3
r=speaker-to-mic distance in m.
The sound pressure p can be converted to sound pressure level
Lp=20*log10(p/0,00002)
Ex:
Sd=500 cm2
Xmax=10 mm
f=30Hz
r=1
p=0.05*0.01*30^2*3.14*1.2/(1*1.41)=1.2 Pa
Lp = 20*log10(1.2/0.00002)=95.56 dB
4 flat tires = how does a dome tweeter survive at 2500 Hz 1st order for any reasonable level of power handling.
4 flat tires = how does a dome tweeter survive at 2500 Hz 1st order for any reasonable level of power handling.
Okay, lets do some calculations then - yes, I can put in the effort of calculating in order to find some answers.
I will use the SEAS 27TBFC/G which was one of the tweeters I included.
I will use the 1st order plot to map out Hz and excursion in dB within Xmax which gets us the following:
Sd = 7.5 cm^2
Xmax = 0.25 mm (p-p = 0.5 mm)
2500 Hz =123.8 dB
12500 Hz = 111.8 dB
625 Hz = 99.7 dB
312.5 Hz = 87.6 dB
156.25 Hz = 75.6 dB
100 Hz = 67.7 dB
At 100 Hz, the Xmax is at 67.7 dB. This is an gain increase of (67.7-56 = 11.7 dB). If we apply an 11.7 dB increase from the baseline at 2500 Hz which is 88 dB, we would produce 99.7 dB.
a +10 dB is x2 volume loudness and x3.16 SPL increase. Normal listening levels in the home is 70-90 dB. 99.8 Hz is fast reaching the tolerance of what we normally endure.
Attachments

Very important measurement, besides frequency response and distortion, is impedance vs frequency graph. Very high impedance peak at resonant frequency can make otherwise excellent tweeter unusable with first order filter (serial capacitor). Serial first-order crossover may be much better option in that case.If we use the 3 tweeters provided, how does one see or tell without listening if it can deal with a 1st order crossover network ?
Without listening, simply put serial capacitor and tweeter measurements in a simulation software (Vituix CAD is excellent and free), and see what is happening. Monitor how much distortion harmonics (especially the third) are attenuated below crossover point.
You are assuming ideal resistance for the tweeter impedance - it is not.Okay, lets do some calculations
Very important measurement, besides frequency response and distortion, is impedance vs frequency graph. Very high impedance peak at resonant frequency can make otherwise excellent tweeter unusable with first order filter (serial capacitor). Serial first-order crossover may be much better option in that case.
Without listening, simply put serial capacitor and tweeter measurements in a simulation software (Vituix CAD is excellent and free), and see what is happening. Monitor how much distortion harmonics (especially the third) are attenuated below crossover point.
So, impedance at Fs and harmonics distortion bellow x-point. This suddenly shed some light on the matter so let me ask you this.
Besides Xmax at any given frequency, is it correct that if the driver goes beyond a certain THD % bellow x-point, its considered unusable for 1st order ?
You are assuming ideal resistance for the tweeter impedance - it is not.
Again, If I knew everything that is involved, I would use it or calculate for it. But since no one is spoon feeding me info, I must guess and use what I know.
I do understand that the impedance on the voice coil changes as the temp goes up, but that is not part of the equation which is under ideal situations.

Yes, but you need to measure distortion at higher SPL, say 95 dB/1m. Some very competent experts are not convinced in the importance of low loudspeaker distortion, but my experience tells otherwise.Besides Xmax at any given frequency, is it correct that if the driver goes beyond a certain THD % bellow x-point, its considered unusable for 1st order ?
Other very important point is that with high impedance peak at resonant frequency and a serial capacitor as a filter you will have there a huge peak in the frequency response below crossover frequency - it will not decrease monotonically at 6 db/octave. This peak may be almost at the same level as the normal tweeter output above crossover point.
Thanks Michael, I will read tomorrow as its getting late 🙂
You're welcome. Take your time.
how does one see or tell without listening if it can deal with a 1st order crossover network ?
This almost seems like a trick question?! 😉
EQ/filter tweeter to high-pass target (-3dB=2500Hz, 6dB/oct ?)
Take on-axis measurements of driver looking for linear and non-linear distortion problems
Choose and filter woofer
Take off-axis measurements of drivers and sums to look for linear distortion in summed responses
Tweeters for first order like the Dynaudio Esotar series have long tinsel leads to deal with excursion at low frequencies. They can manage a couple of mm. Ferrofluid can help by reducing the Fs resonance peak too.
Woofers that work well have a very tidy frequency response in the first place, which means a lot of cone damping in practise. Polycones like Vifa P17 and PL18 have always worked well on a simple coil.
Whether you want to get into impedance correction is up to you. It makes filters behave more ideally but needs good techniques to create bafflestep.
This is a combination that can play nicely with first order. Coil and Cap and maybe some resistive level adjust. Joachim Gerhard told us so, and he's no mug.

Woofers that work well have a very tidy frequency response in the first place, which means a lot of cone damping in practise. Polycones like Vifa P17 and PL18 have always worked well on a simple coil.
Whether you want to get into impedance correction is up to you. It makes filters behave more ideally but needs good techniques to create bafflestep.
This is a combination that can play nicely with first order. Coil and Cap and maybe some resistive level adjust. Joachim Gerhard told us so, and he's no mug.
 Some housekeeping notes:
Some housekeeping notes:Please do not quote the entire post just above yours. (see the rules)
Keep image size reasonable. 1500 pixels wide maximum, 1300 max preferred.
Cheers!
I am back and I think I've worked it out. Do correct me if I am wrong.
- The 1st order is used to maintain minimum control of the driver and thus also minimize phase and frequency shifts.
- If the driver is capable of damping its own ringing (bell mode) and cone breakup then minimum correction network is needed.
- The choice of order is very much down to how the driver generate or manage harmonic distortion. Ideally it is as low as possible.
- if 1st order is a desire, the engineer is more than likely to look for specific drivers rather than selecting filter order to tame the driver he/she wants to use.
- The 1st order management must be measured and listened to. All distortions are not bad distortions, therefore it is subjective if the distortion causes acoustical problems or not.
I did find a page which explain 1st orders better than I can.
1st order crossovers / Why use them?
But I think in the end, the only possibility is to measure the drivers to see if it can get by with a simple 1st or not. Much of what will be used in the filter section is very subjective.
Thanks for everyone's input. It helped me greatly.
- The 1st order is used to maintain minimum control of the driver and thus also minimize phase and frequency shifts.
- If the driver is capable of damping its own ringing (bell mode) and cone breakup then minimum correction network is needed.
- The choice of order is very much down to how the driver generate or manage harmonic distortion. Ideally it is as low as possible.
- if 1st order is a desire, the engineer is more than likely to look for specific drivers rather than selecting filter order to tame the driver he/she wants to use.
- The 1st order management must be measured and listened to. All distortions are not bad distortions, therefore it is subjective if the distortion causes acoustical problems or not.
I did find a page which explain 1st orders better than I can.
1st order crossovers / Why use them?
But I think in the end, the only possibility is to measure the drivers to see if it can get by with a simple 1st or not. Much of what will be used in the filter section is very subjective.
Thanks for everyone's input. It helped me greatly.
- Status
- Not open for further replies.
- Home
- Loudspeakers
- Multi-Way
- 1st order and drivers.