DPH,
on the DT system, for the PID loops they take the output from the gain math and add it to an accumulator. If the accumulator overflows it's register, the DT sends a step pulse with direction positive. If the accumulator underflows, it sends a step but with negative direction. It is a totally linear pulse frequency conversion for steppers.
Otherwise, for servo's it just uses the output value with some scaling and software limits.
For my personal CNC and EDM machines, I was thinking of using arduino's to control each axis, have the host PC send specific locations for the arduino's to be at in real time. Being open loop systems, i would have to make sure the host doesn't ask for a move beyond the stepper capability, either in acceleration or velocity. I'd hate to be in the middle of a workpiece just to have a motor stall out. Actually, I can program the arduino's for a maximum velocity, and send a word back if the value exceeds the software limit. But then, error handling....sigh, just gave myself a headache...It must be past 5 o'clock somewhere in the world....happy hour..
I could also just use the rasberry Pi, just another thing I'd have to larn.
What did that guy on the video say....faceplanting on a steep learning curve.
jn
on the DT system, for the PID loops they take the output from the gain math and add it to an accumulator. If the accumulator overflows it's register, the DT sends a step pulse with direction positive. If the accumulator underflows, it sends a step but with negative direction. It is a totally linear pulse frequency conversion for steppers.
Otherwise, for servo's it just uses the output value with some scaling and software limits.
For my personal CNC and EDM machines, I was thinking of using arduino's to control each axis, have the host PC send specific locations for the arduino's to be at in real time. Being open loop systems, i would have to make sure the host doesn't ask for a move beyond the stepper capability, either in acceleration or velocity. I'd hate to be in the middle of a workpiece just to have a motor stall out. Actually, I can program the arduino's for a maximum velocity, and send a word back if the value exceeds the software limit. But then, error handling....sigh, just gave myself a headache...It must be past 5 o'clock somewhere in the world....happy hour..
I could also just use the rasberry Pi, just another thing I'd have to larn.
What did that guy on the video say....faceplanting on a steep learning curve.
jn
Last edited:
My three axis milling machine intended as an engraver uses stepping motors and led phototransistor limit sensors.
My turret press uses nicely sealed servo motors with built in optical discs and sensors. Really well sealed as they were under water for hurricane Ivan.
My CNC router uses rails for the router to move on above the table. As a result the wood dust coats them and clogs the linear bearings! Can't believe the manufacturer made more than one!
Stepper motors seem to be fine, however my servo motors are rated in horsepower! Fortunately the don't need to be fed hay, electricity works fine. 😉
My turret press uses nicely sealed servo motors with built in optical discs and sensors. Really well sealed as they were under water for hurricane Ivan.
My CNC router uses rails for the router to move on above the table. As a result the wood dust coats them and clogs the linear bearings! Can't believe the manufacturer made more than one!
Stepper motors seem to be fine, however my servo motors are rated in horsepower! Fortunately the don't need to be fed hay, electricity works fine. 😉
JN -- do have a look at other ecosystems for controlling your edm and mill. I like LinuxCNC (and hate Mach3) but there are others as well (centroid? Masso?). Whole truckloads more straightforward (and robust) than using a bunch of arduinos to drive H-bridges (GBRL).
But step-direction stepper drivers are cheap, and you can do a lot with a parallel port (or a relatively inexpensive control board). And get frustrated making things rather than frustrated with making things to make things. 🙂 (Unless you want that kind of experience!)
But step-direction stepper drivers are cheap, and you can do a lot with a parallel port (or a relatively inexpensive control board). And get frustrated making things rather than frustrated with making things to make things. 🙂 (Unless you want that kind of experience!)
DPH
There is a fine line between learning how to make things....and making things.
For me, in my old age, it seems the journey is by far the most important thing.
Well, ok...i must admit, it is far more important to teach the next generation how to build on what I've done. I do still have odd feelings on doing that, but this is what I wanted....
I had considered having the upper level guys allow me to take a Delta Tau home to work on my stuff, they can only benefit from my learning...but that is a chain I am not sure is good.
ps...
for my edm, I am making a harmonic drive using 3-D printing.. a 70 tooth gear and a 69 tooth, same diameter made for 5mm belt. With a stepper and some reduction, 4.5 million steps per rotation. then, a harmonic drive for the linear axis. For the spark, a very well controlled stripline feeding the spark, rise time sub nano, voltage around 20 volts, intent is mirror finish since I intend to make watch and clock gears and prefer not to polish later... what part of "fun" needs explaining... since it is a hobby, failure or success is acceptable.
I think that if I am successful, I will extend the capability of wire EDM beyond what is SOTA. If not, oh well, it's a hobby...and my 401 will not care...
jn
There is a fine line between learning how to make things....and making things.
For me, in my old age, it seems the journey is by far the most important thing.
Well, ok...i must admit, it is far more important to teach the next generation how to build on what I've done. I do still have odd feelings on doing that, but this is what I wanted....
I had considered having the upper level guys allow me to take a Delta Tau home to work on my stuff, they can only benefit from my learning...but that is a chain I am not sure is good.
ps...
for my edm, I am making a harmonic drive using 3-D printing.. a 70 tooth gear and a 69 tooth, same diameter made for 5mm belt. With a stepper and some reduction, 4.5 million steps per rotation. then, a harmonic drive for the linear axis. For the spark, a very well controlled stripline feeding the spark, rise time sub nano, voltage around 20 volts, intent is mirror finish since I intend to make watch and clock gears and prefer not to polish later... what part of "fun" needs explaining... since it is a hobby, failure or success is acceptable.
I think that if I am successful, I will extend the capability of wire EDM beyond what is SOTA. If not, oh well, it's a hobby...and my 401 will not care...
jn
Last edited:
Neither of us are (probably) going pro in this stuff, so it's all about the journey. Gotta admit I'd rather have the machine working so I can either make it better or make things on it, but I also spent an entire day making a mallet with hand tools and it was glorious.
I do both.
The stuff at work, yah..SOTA, beyond what anybody else on the planet does.
Who cares...
Yes, I am paid, so I guess I am pro....
My real concern is, can the next generation continue. So far, the guy I had them hire had not dissapointed.
There are two more.
jn
The stuff at work, yah..SOTA, beyond what anybody else on the planet does.
Who cares...
Yes, I am paid, so I guess I am pro....
My real concern is, can the next generation continue. So far, the guy I had them hire had not dissapointed.
There are two more.
jn
I do both.
The stuff at work, yah..SOTA, beyond what anybody else on the planet does.
Who cares...
Yes, I am paid, so I guess I am pro....
My real concern is, can the next generation continue. So far, the guy I had them hire had not dissapointed.
There are two more.
jn
Well, yeah, the stuff I'm doing at work pushes the envelope (or is trying to, in my field at least), but me dorking around with a cnc mill in the isn't necessarily. That's what I meant 🙂
We ‘ve read here enough of the dogfight
If you consider your membership as of any value to you, better control your egos and stop polluting the whole Forum
George

Thank you George!
Howie
My three axis milling machine intended as an engraver uses stepping motors and led phototransistor limit sensors.
My turret press uses nicely sealed servo motors with built in optical discs and sensors. Really well sealed as they were under water for hurricane Ivan.
My CNC router uses rails for the router to move on above the table. As a result the wood dust coats them and clogs the linear bearings! Can't believe the manufacturer made more than one!
Stepper motors seem to be fine, however my servo motors are rated in horsepower! Fortunately the don't need to be fed hay, electricity works fine. 😉
I am still using an old Acurite servo drive on my knee mill....DOS based, but with a GUI looking interface...I replaced the HDD with an SSD and do backups......but if the hardware goes south...ever try hand-milling a circle?
Happy Sunday all!
Howie
I think they make an upgrade kit for my mill. It replaces all the acmes with recirc balls and puts nema 23's on all three axis.
I really feel I should learn how to use a mill first before I consider that. There are so many things I still need to learn how to do properly on it.
Jn
I really feel I should learn how to use a mill first before I consider that. There are so many things I still need to learn how to do properly on it.
Jn
J
I have some of my guys now trying to out do me!
Well at least in some areas.
Then you're a good boss! If you can inspire your team to be better than you then you're a good guy in my book.
About 20 yrs ago, I did a 3 yr course at university. About 6 months after I started, 3 of the guys in my team decided to also do university courses (they were already BSc EE's - they added business degrees to their resume's. They all got their degrees (3-4 yrs part time study).
once upon a time... 10 memory registers
Programma 101 - Wikipedia
Pier Giorgio Perotto - Wikipedia
Intel 4004 - Wikipedia
Federico Faggin - Wikipedia
Programma 101 - Wikipedia
Pier Giorgio Perotto - Wikipedia
Intel 4004 - Wikipedia
Federico Faggin - Wikipedia
I like LinuxCNC (and hate Mach3)
I meant to ask you, why you dislike Mach3. I had initially picked up a smoothieboard to control my wood CNC, and I recall it used Mach3.
jn
I meant to ask you, why you dislike Mach3. I had initially picked up a smoothieboard to control my wood CNC, and I recall it used Mach3.
jn
Level of control and configurability are some of the big ones. You can't set up certain macros to automate processes nicely (e.g. tool length probing). It connects to an external motion control board and gives high level commands versus low latency interface. Ecosystem is open loop, rather than allowing for feedback to the main control routines.
It feels clunky, has to be run in Windows rather than a real-time OS and suffers those vagaries. It crashed regularly and inconveniently.
Admittedly my experience with Mach3 was on a machine owned by a research hospital and IT would not let us isolate the machine from their "control" (ahem), so we got nailed by a ton of that crap, which was beyond frustrating.
But having used LinuxCNC on a small, very crappy CNC router, it worked way better. And the ecosystem is essentially imagination limited (or patience with learning intricacies).
George will tell me off, but I don't care...
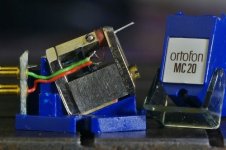
My Cartridge purchase for 2021 is an Ortofon Mc20 Mk1. It arrived from ebay in a sad and broken state so I sent it to Russia with instructions for a low DCR winding to be fitted. It's now 0.8Ohms and 0.07mV output. New core, new suspension, new cantilever.
70s Ortofon MCs used a fairly weak cobolt magnet then got stronger through the 80s then made a jump to Neo with some work on focussing the magnetic field to get to the level they are today. So this is very old skool and just for the fun of it (and something that justifies a silly low noise phono stage).
My Cartridge purchase for 2021 is an Ortofon Mc20 Mk1. It arrived from ebay in a sad and broken state so I sent it to Russia with instructions for a low DCR winding to be fitted. It's now 0.8Ohms and 0.07mV output. New core, new suspension, new cantilever.
70s Ortofon MCs used a fairly weak cobolt magnet then got stronger through the 80s then made a jump to Neo with some work on focussing the magnetic field to get to the level they are today. So this is very old skool and just for the fun of it (and something that justifies a silly low noise phono stage).
Attachments
Level of control and configurability are some of the big ones. You can't set up certain macros to automate processes nicely (e.g. tool length probing). It connects to an external motion control board and gives high level commands versus low latency interface. Ecosystem is open loop, rather than allowing for feedback to the main control routines.
It feels clunky, has to be run in Windows rather than a real-time OS and suffers those vagaries. It crashed regularly and inconveniently.
Admittedly my experience with Mach3 was on a machine owned by a research hospital and IT would not let us isolate the machine from their "control" (ahem), so we got nailed by a ton of that crap, which was beyond frustrating.
But having used LinuxCNC on a small, very crappy CNC router, it worked way better. And the ecosystem is essentially imagination limited (or patience with learning intricacies).
Because I freeze the operating system and all upgrades once a machine is working and in production, nobody gets to upgrade it...nor antivirus it..
I have an understanding with IT.
(Yes, the threats are worse than death...)
They stay away from my winders, as they know I have 3 kilowatts of PA system, duct tape, a lawn chair, and a copy of Pavaratti's "Nessun Dorma"..
"I have Pavaratti.....and I'm not afraid to use it." On repeat, with the dancers with big hair in danskin leotards looking so...80's..
Once there is 3 to 4 million dollars in play, and a 2 billion dollar machine relying on the completion of a specific focussing magnet (typically a 6 to 9 month project), having a windows upgrade toast the machine and magnet is just not gonna happen.
Linux CNC sounds like a reasonable thing. I will be getting my raspberry Pi book tomorrow, so looks like I'm about to faceplant on a steep learning curve....again. Luckily, my replacement happens to be a good source for this stuff.
Thanks for the wisdom..
jn
ps..I had mentioned raspberry Pi a few days ago on a post, and what a coincidence....amazon sends me an e-mail the next day saying they have a "suggestion" for me....a book on raspberry PI architecture... oh my, will wonders never cease...😕 I've been buying gluten free pasta, PLA, MT3 to 2 adapters, ER20 collets, and suddenly amazon out of the blue suggests a book on raspberry Pi's..amazing.
ps..I had mentioned raspberry Pi a few days ago on a post, and what a coincidence....amazon sends me an e-mail the next day saying they have a "suggestion" for me....a book on raspberry PI architecture... oh my, will wonders never cease... I've been buying gluten free pasta, PLA, MT3 to 2 adapters, ER20 collets, and suddenly amazon out of the blue suggests a book on raspberry Pi's..amazing.
Not surprising at all, after responding to the toilet literature thread I got this constantly. Specifically from my childhood issue that I never used a stall, ever, K-12.
Attachments

Last edited:
- Home
- Member Areas
- The Lounge
- The Black Hole......