@ Jean Claude
Why not place your order at Mädler in Germany.
@ David
Yes, "Gedotec Drehbeschlag" will work and Pololu with 67 rpm also.
Regards
Heinrich
Why not place your order at Mädler in Germany.
@ David
Yes, "Gedotec Drehbeschlag" will work and Pololu with 67 rpm also.
Regards
Heinrich
Well, I have the,
- slewing ring (lazy susan w/gear)
- pinion gear
- circuit board
on order from Germany.
All I have to do now is settle on a,
- Motor
- Power Supply
- Jack for Power supply
- USB B male cable to a port of some type.
- slewing ring (lazy susan w/gear)
- pinion gear
- circuit board
on order from Germany.
All I have to do now is settle on a,
- Motor
- Power Supply
- Jack for Power supply
- USB B male cable to a port of some type.
@ Jean Claude
Why not place your order at Mädler in Germany.
@ David
Yes, "Gedotec Drehbeschlag" will work and Pololu with 67 rpm also.
Regards
Heinrich
Hello Heinrich,
Can you explain the math here, (cut and paste from another forum)
---
The phidgets encoder has 360 counts per rotation. In the following the calculation of the parameters:
sprocket = 176
pinion =11
Motor = 139.150696
Decoder = 360
factor = 2226.411
A = 1000
B = 2226411
@ Jean Claude
Why not place your order at Mädler in Germany.
Regards
Heinrich
Hi Heinrich,
Well It looks to me that Mädler does not have a webshop (or at least, I was not able to find it), but thanks for the link, they have a french rep who is willing to order the module for me !
Best regards
Jean Claude
Hello Heinrich,
Can you explain the math here, (cut and paste from another forum)
---
The phidgets encoder has 360 counts per rotation. In the following the calculation of the parameters:
sprocket = 176
pinion =11
Motor = 139.150696
Decoder = 360
factor = 2226.411
A = 1000
B = 2226411
Nevermind, I found the info, 🙂
The two scaling factors for the encoder determine the angular position of the turntable. The following information must be known for the calculation:
n = number of teeth of the pinion
N = number of teeth of the slewing ring
U = reduction of the geared motor
I = number of pulses of the encoder per revolution
The factor A is a pure scaling factor and can be freely selected. The calculation of the scaling factor B is as follows:
Scaling Factor B = N / n ∙ U ∙ I / 360 = Impulse / °
Example:
n = 11, N = 176, U = 131.25, I = 16
Scaling Factor B = 176 / 11 ∙ 131.25 ∙ 16/360 = 93.333 p / °
Since both factors can only be integers, A = 1000 should be chosen because of the better resolution (taking into account 3 decimal places).
Scaling factor A = 1 and B = 93 or for better resolution
scaling factor A = 1000 and B = 93333.
I will be doing the final wiring on my Arta turntable tomorrow and giving it a spin, but I could use some help with setting it up.
I am using,
- Hefter 330mm slewing ring
- Mädler 11 tooth gear
As shown in the Arta table documentation, but for a motor I am using the,
- Pololu 150:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder.
What parameters will I need to adjust in the following two windows?
- Parameters USB Rotary Table
- USB Rotary Table Parameter Fine Tuning
I expect Scaling Factor A and Scaling Factor B will need to be adjusted?
Any help would be appreciated.
Thank you, David.
I am using,
- Hefter 330mm slewing ring
- Mädler 11 tooth gear
As shown in the Arta table documentation, but for a motor I am using the,
- Pololu 150:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder.
What parameters will I need to adjust in the following two windows?
- Parameters USB Rotary Table
- USB Rotary Table Parameter Fine Tuning
I expect Scaling Factor A and Scaling Factor B will need to be adjusted?
Any help would be appreciated.
Thank you, David.
Attachments


Sometime in the 50's my father built an Xmas tree turntable - complete with slip ring commutators and AC sockets on the table. By the time I became conscious of it, its friction drive to the gear motor had worn out and it wouldnt turn anymore.
That's quite a piece of art you have there, David. I bet it still works 50 years from now~
Who knows what USB will be thought of after such passage of time.
That's quite a piece of art you have there, David. I bet it still works 50 years from now~
Who knows what USB will be thought of after such passage of time.
I have a motor with 131:1 / 64 CPR, so the scaling factor will be different with your.
I played around a bit with the Acceleration, Decelleration and Speed to get the turntable to behave as it should with the load i put on it.
Here's my config:
[Rotary Table]
RotaryTableType=2
[Application Setup]
AutoSaveSetup=True
[MotorUSBBoard]
P_Factor=90
I_Factor=0
D_Factor=0
MaximumPWMPower=90
MinimumPWMPower=10
AccSpeed=5
Speed=10
DeccSpeed=5
[EncoderUSBBoard]
ScalefactorA=1000
ScalefactorB=93863
UnitPosition=°
[Rotary Table Simulation]
PositioningTimeSec=1
I played around a bit with the Acceleration, Decelleration and Speed to get the turntable to behave as it should with the load i put on it.
Here's my config:
[Rotary Table]
RotaryTableType=2
[Application Setup]
AutoSaveSetup=True
[MotorUSBBoard]
P_Factor=90
I_Factor=0
D_Factor=0
MaximumPWMPower=90
MinimumPWMPower=10
AccSpeed=5
Speed=10
DeccSpeed=5
[EncoderUSBBoard]
ScalefactorA=1000
ScalefactorB=93863
UnitPosition=°
[Rotary Table Simulation]
PositioningTimeSec=1
Hi David,
the calculation for the Polulo 150:1 gear motor is as follows:
Scaling Factor B = N/n ∙ U ∙ I/360 = Impulse/°
N = 176
n = 11
U = 150
I = 64
B = 426.666
If A = 1000 --> B = 426000
Regards
Heinrich
the calculation for the Polulo 150:1 gear motor is as follows:
Scaling Factor B = N/n ∙ U ∙ I/360 = Impulse/°
N = 176
n = 11
U = 150
I = 64
B = 426.666
If A = 1000 --> B = 426000
Regards
Heinrich
Hi David,
the calculation for the Polulo 150:1 gear motor is as follows:
Scaling Factor B = N/n ∙ U ∙ I/360 = Impulse/°
N = 176
n = 11
U = 150
I = 64
B = 426.666
If A = 1000 --> B = 426000
Regards
Heinrich
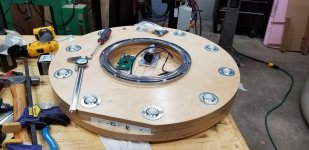
My ring gear is 178 tooth (both my wife and I counted it 🙂 ) and here is the math I came up with,
N = 178
n = 11
U = 150
I = 64
B = 431.515
If A = 1000 --> B = 431515
Here is the thing, that number does not work!
For some reason, it is off by a factor of four.
Through trial and error, I am using B=107225.
I double checked that I received the motor I ordered, and it is indeed the correct one, as well as all the connections.
Pololu - 150:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder (Helical Pinion)
^This one.
Here is a short vid of the table moving from 0º-180º-0º
Arta Turntable 0 to 180 to 0 - YouTube
And some pictures of the motor, connections and software settings.
Any thoughts as to why Scaling Factor B is so wrong?
Thank you,
David.
Attachments



David,
I have just finished my table using the same Polulu motor as you (Polulu ref 2828 ) and I have the same problem : I have to divide by a factor of 4 to get the correct rotation.
I would really like to understand !
Any idea Heindrich ?
Jean Claude
I have just finished my table using the same Polulu motor as you (Polulu ref 2828 ) and I have the same problem : I have to divide by a factor of 4 to get the correct rotation.
I would really like to understand !
Any idea Heindrich ?
Jean Claude
Last edited:
David,
I have just finished my table using the same Polulu motor as you (Polulu ref 2828 ) and I have the same problem : I have to divide by a factor of 4 to get the correct rotation.
I would really like to understand !
Any idea Heindrich ?
Jean Claude
Well at least it was not just me!
Any pics of yours?
David.
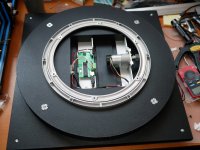
For sure,
I use 30 x 50 mm aluminum corner with 3 mm thickness. I make my motor support in two parts to allow easy final adjustment and also add adjustable feet at the bottom.
table tournante auto jcg_2_low.jpg
I also place a 40 cm x 40 cm sheet of lead (7 mm thick) below the base plate to incease stability.
Here is the gear in situation
table tournante auto jcg_1_low.jpg
I use 30 x 50 mm aluminum corner with 3 mm thickness. I make my motor support in two parts to allow easy final adjustment and also add adjustable feet at the bottom.
table tournante auto jcg_2_low.jpg
I also place a 40 cm x 40 cm sheet of lead (7 mm thick) below the base plate to incease stability.
Here is the gear in situation
table tournante auto jcg_1_low.jpg
Attachments


Hi, Besides the Pololu I used this motor from Phidgets in my test setup (12V/8.4Kg-cm/28RPM 139:1 DC Gear Motor w/Encoder - 3264E_0 at Phidgets). Both worked as described in the application note.
The encoder seems to be the problem (factor 4 means 16 CPR). I will try to contact Wim.
Regards
Heinrich
The encoder seems to be the problem (factor 4 means 16 CPR). I will try to contact Wim.
Regards
Heinrich
Last edited:
Hi Heinrich,
Thanks for the answer, unfortunately the Phidgets motor is now discontinued !
And you are right, it seems related to the way the interface interpret the CPR
Hopefully, a solution could be found.
In the meantime, when the table rotate let's say from 0° to 180°, it accelerate, then slow down, then accelerate again and so on until it reach it's final position. It can be seen in the you tube link Davefred just posted a few post above:
Arta Turntable 0 to 180 to 0 - YouTube
Thanks for the answer, unfortunately the Phidgets motor is now discontinued !
And you are right, it seems related to the way the interface interpret the CPR
Hopefully, a solution could be found.
In the meantime, when the table rotate let's say from 0° to 180°, it accelerate, then slow down, then accelerate again and so on until it reach it's final position. It can be seen in the you tube link Davefred just posted a few post above:
Arta Turntable 0 to 180 to 0 - YouTube
Hello,
I am starting to use my Arta rotary table and I find it "jitters" excessively when "settling" into each incremental stopping position.

Can a few people share their "Parameters USB Rotary Table USB Power Board Setup" setups?

Thank you,
David.
I am starting to use my Arta rotary table and I find it "jitters" excessively when "settling" into each incremental stopping position.
Can a few people share their "Parameters USB Rotary Table USB Power Board Setup" setups?
Thank you,
David.
Hello David, may i know how did you get the slewing ring and the pinion shipped in your contry ? Im from Mexico, and i can not find anywhere to get them here.
Regards!
Regards!
- Home
- Loudspeakers
- Multi-Way
- Polar measurements with automatic turntable