Hi,
regarding acceleration sensors.
Freescale offers some models which might be interesting as well as lowcost.
The Micro machined MMA1200-series (+-250g, 2%FSO nonlinearity, 110µV/Hz^1/2) and the MMA2300-series (+-250g, 1%FSO nonlinearity, 110µV/Hz^1/2). Both coming in a SOIC16 casing and low output impedance, rendering the requirement for special cables obsolete. Listed at Digikey.
And how about a digital output sensor?
Freescale offers the Xtrinsic MMA26xx-series with DSI2.5 compatible digital output (Welcome to Freescale - Freescale Semiconductor).
Piezoresistive sensors as well as Sensors after IEPE (with AC-coupled voltage output) may suffice.
See 7264 and 7264B4 and 2256A, 2250A of Endevco-Meggit (www.endevco.com) or the KS91B and KS94B, KS94L of MMF (Beschleunigungsaufnehmer und Schwingungsmesstechnik von Metra)
jauu
Calvin
The biggest problem with a lot of these MEMS devices is the very low bandwidth and sharp cutoff 4th order bessel filter which for these devices is only 400Hz so there would be too much phase shift added to that of the speaker. Compare with the ACH-01-03 piezo device which has a bandwidth of 20KHz !!
regards
david
Hi,
The mentioned acceleration sensors are all > +-250g, as I think that +-150g of the ACH1-03 could be marginal or too low for longthrow drivers.
The peak acceleration value may be easily calculated as â = 4*pi²*f²*Xmax.
With f = chosen upper bandwidth limit in Hz (or 1/s), for example 100Hz for a Subwoofer and Xmax = maximum excursion in m, for example 20mmp-p = 10mm = 0.01m.
This would calculate to 3948m/s² or 402g!
The 150g limit of the ACH01-03 would be reached for 20mmp-p excursion at 61Hz. Could be a bit low?
Or is the overhead of the ACH01-03 large enough (accepting increased nonlinearity)?
David, have You made provisions to implement other acceleration sensors with greater g-range?
jauu
Calvin
20 mm p-p could be high or low depending on the frequency and SPL required vs the diameter and power handling capability of the driver. If it is largish driver then the amp may run out of steam before the accelerometer does !!
The dsp servo board has provision for accepting other accelerometers. It has onboard connector to directly accept the ACH-01-03 and another general purpose 10 pin IDC header with differential input and supply.
regards
david
When I was experimenting with the pressure feedback system, I developed a low distortion high SPL pressure transducer capable of responding down to 1Hz at 160 dB which is the sort of capability needed when measuring the sound pressure close to the diaphragm.
Hi David ,
Kindly advise whether this piston system was servo motor controlled . Or pneumatic piston with a directional control orifices bored onto the piston .
Great research & outstanding implementation .
Suranjan
It was essentially a wide bandwidth microphone in close proximity (3 cm) to a speaker diaphragm mounted in a sealed box and with a servo amplifier implemented using a dsp. It sort of worked but not well enough for my likings.
regards
david
regards
david
Hi,
The mentioned acceleration sensors are all > +-250g, as I think that +-150g of the ACH1-03 could be marginal or too low for longthrow drivers.
The peak acceleration value may be easily calculated as â = 4*pi²*f²*Xmax.
With f = chosen upper bandwidth limit in Hz (or 1/s), for example 100Hz for a Subwoofer and Xmax = maximum excursion in m, for example 20mmp-p = 10mm = 0.01m.
This would calculate to 3948m/s² or 402g!
The 150g limit of the ACH01-03 would be reached for 20mmp-p excursion at 61Hz. Could be a bit low?
Or is the overhead of the ACH01-03 large enough (accepting increased nonlinearity)?
David, have You made provisions to implement other acceleration sensors with greater g-range?
jauu
Calvin
150g should be enough for most systems. I have run some calculations where I assume the drivers must not exceed x-max in the 30-100Hz range for the same input power. I have done this because normally we want to EQ up the lower frequencies and not the higher ones (70-100). And as you can see, in the low frequencies the g-force is not that high.
Peerless XXLS 12" 830845.
Maximum input power is 100W before exceeding 12.5mm @ 30Hz.
This gives 45g and 103 dB SPL @ 30Hz and 2mm X-Max, 80g and 108 dB SPL @ 100Hz. No need for this driver then.
Beyma 18SW1600Nd 18" pro driver.
Maximum input power is 300W before exceeding 10mm @ 30Hz.
This gives 36g and 109 dB SPL @ 30Hz and 2.2mm X-Max, 89g and 117 dB SPL @ 100Hz. No need for this driver either.
TC Sounds Axis 12Q1:
Maximum input power is 700W before exceeding 16.5mm @ 30Hz.
This gives 60g and 106 dB SPL @ 30Hz and 3.3mm X-Max, 133g and 113 dB SPL @ 100Hz. No need for this driver either, but close.
MF is meaningless over 200 Hz or so because the sound output (and distortion products) of the driver starts diverging from the motion of the dust cap (AKA the one and only reference point for an accelerometer or VC bridge).The biggest problem with a lot of these MEMS devices is the very low bandwidth and sharp cutoff 4th order bessel filter which for these devices is only 400Hz so there would be too much phase shift added to that of the speaker. Compare with the ACH-01-03 piezo device which has a bandwidth of 20KHz !!
regards
david
It is true that a mic would always be a true reference point, as some here have imagined. But there is no way I can think of to make a mic work in this kind of feedback which would be partly speed of sound and partly speed of electricity.
In the design of drivers, this is one (of several) aspects that more closely resemble the art of cooking than the science of physics.
The purpose of MF is to make the motion of the dust cap match the electric signal.
Ben
The phase shift of a 4th order low pass filter with a cutoff frequency of only 400Hz is quite significant even at 200Hz so much so that it can effect stability. It needs to have at least a cutoff frequency of at least ten times this amount to be useful in a feedback loop. These MEMs device use low pass filters with sharp cutoff characteristics at low frequencies simply to suppress the modulation carrier.
Regarding a microphone. At 3 cm away from the diaphragm there is a group delay of 0.03/345 = 87uS which is tolerable for low frequencies. However like I have stated before the biggest problem with this method is the feedback loop is vulnerable to external acoustic noise. Also doppler distortion maybe something that can't be corrected with feedback.
regards
david
Regarding a microphone. At 3 cm away from the diaphragm there is a group delay of 0.03/345 = 87uS which is tolerable for low frequencies. However like I have stated before the biggest problem with this method is the feedback loop is vulnerable to external acoustic noise. Also doppler distortion maybe something that can't be corrected with feedback.
regards
david
Hi,
well, maybe we should introduce a new or refined classification of excursion capabilities. 🙂
Indeed are all drivers in Armands list longthrow drivers, after common standards. But over the years even greater excursion capable drivers have emerged. The TCsounds Axis 12 for example is rather at the lower end of other drivers of this and several other companies. The top of the line TCsounds, the LMS-R15 and even more the LMS-Ultra5400 allow for >2", resp. >3" p-p excursion. I call those driver class the super-longthrow types.
For these kind of drivers the +-150g might be marginal or even too low. Now the measuring range of the ACH01 won´t end at +150g or -150g but will enter a range of overhead with higher nonlinearity. So it may suffice such drivers also.
But an eye should be kept on that factor, as a MF system should not be driven at the edge or even outside the sensor´s range.
I assume, that David implemented some sorts of limiters or safety precautions (probabely user configurable?), hindering the system to run into the ´overload´ zone?
jauu
Calvin
well, maybe we should introduce a new or refined classification of excursion capabilities. 🙂
Indeed are all drivers in Armands list longthrow drivers, after common standards. But over the years even greater excursion capable drivers have emerged. The TCsounds Axis 12 for example is rather at the lower end of other drivers of this and several other companies. The top of the line TCsounds, the LMS-R15 and even more the LMS-Ultra5400 allow for >2", resp. >3" p-p excursion. I call those driver class the super-longthrow types.
For these kind of drivers the +-150g might be marginal or even too low. Now the measuring range of the ACH01 won´t end at +150g or -150g but will enter a range of overhead with higher nonlinearity. So it may suffice such drivers also.
But an eye should be kept on that factor, as a MF system should not be driven at the edge or even outside the sensor´s range.
I assume, that David implemented some sorts of limiters or safety precautions (probabely user configurable?), hindering the system to run into the ´overload´ zone?
jauu
Calvin
This is perfect !
I have two bass drivers waiting for this --> LMS Ultra 5400's [TC Sounds]. I got them for their low distortion in the first place... this will help further that goal. Can you give me a clue as to approximately how long I will have to wait for your design/product?
Thx-RNMarsh
I have two bass drivers waiting for this --> LMS Ultra 5400's [TC Sounds]. I got them for their low distortion in the first place... this will help further that goal. Can you give me a clue as to approximately how long I will have to wait for your design/product?
Thx-RNMarsh
Last edited:
snip
Regarding a microphone. At 3 cm away from the diaphragm there is a group delay of 0.03/345 = 87uS which is tolerable for low frequencies. However like I have stated before the biggest problem with this method is the feedback loop is vulnerable to external acoustic noise. Also doppler distortion maybe something that can't be corrected with feedback.
regards
david
Yes, "3 cm" from the dust cap may not mean too many phase degrees error at very low frequencies. But a mic also picks up sound produced by parts of the cone a whole lot more error degrees away which is the death of negative feedback. Anyway, no sense beating a dead horse like mic MF.
TNMarsh - until David's is ready, maybe you should study and experiment yourself. I never heard of a generic MF appliance even though it would be great to have one out there. These systems, present company excepted, are very unstable unless you make the loop weak. Even the commercial MF integrated systems seem to have short model (and possibly operational) lives (and I hope others will correct me and explain the reason for the longevity).
Ben
Last edited:
Hi,
well, maybe we should introduce a new or refined classification of excursion capabilities. 🙂
Indeed are all drivers in Armands list longthrow drivers, after common standards. But over the years even greater excursion capable drivers have emerged. The TCsounds Axis 12 for example is rather at the lower end of other drivers of this and several other companies. The top of the line TCsounds, the LMS-R15 and even more the LMS-Ultra5400 allow for >2", resp. >3" p-p excursion. I call those driver class the super-longthrow types.
For these kind of drivers the +-150g might be marginal or even too low. Now the measuring range of the ACH01 won´t end at +150g or -150g but will enter a range of overhead with higher nonlinearity. So it may suffice such drivers also.
But an eye should be kept on that factor, as a MF system should not be driven at the edge or even outside the sensor´s range.
I assume, that David implemented some sorts of limiters or safety precautions (probabely user configurable?), hindering the system to run into the ´overload´ zone?
jauu
Calvin
In these extreme cases you may have to use a 200g or 500g accelerometer. They are more expensive but have a number of other advantages compared to the ACH-01.
805?Vibration Sensors?Piezoelectric Embedded Accelerometers?Measurement Specialties
805M1?Vibration Sensors?Piezoelectric Embedded Accelerometers?Measurement Specialties
Why not use multiple drivers to distribute the load instead of trying of trying to do it all with one driver ? A larger radiating surface area means lesser acceleration for a given SPL. The Infinity IRS works like this 😉 Six 12-inch drivers has the same radiating area of three 18 inch drivers and has much better high frequency response 😉
An externally hosted image should be here but it was not working when we last tested it.
regards
david
Last edited:
This is perfect !
I have two bass drivers waiting for this --> LMS Ultra 5400's [TC Sounds]. I got them for their low distortion in the first place... this will help further that goal. Can you give me a clue as to approximately how long I will have to wait for your design/product?
Thx-RNMarsh
As I pointed out at the start of the thread everything is still in development so it will be a while yet. Having said that, the feedback and discussion so far is providing valuable feedback for last minute changes.
Also your LMS may not need much feedback at all 😉
regards
david
Why not use multiple drivers to distribute the load instead of trying of trying to do it all with one driver ? A larger radiating surface area means lesser acceleration for a given SPL. The Infinity IRS works like this 😉 Six 12-inch drivers has the same radiating area of three 18 inch drivers and has much better high frequency response 😉
regards
david
6 drivers, 6 sensors, and 6 amps would be fine. But kind of weird neg. feedback design to have one sensor control 6 drivers.... but maybe.
But back to the basic good design: one driver, working only in the band where MF is needed and feasible (10 - 200 Hz).
Ben
Only one sensor is needed provided all drivers are identical and loaded by the same volume of air 😉
regards
david
regards
david
I never use smileys, for obvious reasons. Are you kidding and what part are you kidding about?
If you are not kidding, then I can't too strongly point out that is no way to run a negative feedback system with something as flakey as a sub driver (well, as compared to a well-behaved electric component).
Drivers are complex mixes of forces working in funny art-and-science ways to make sound that sounds OK to our ears. Some of that truth is lost on folks with their noses deep into computer models which never allow for the reality that cone drivers are not well behaved.
But while it is certainly unorthodox design, it is possible some improvement might possibly arise with one sensor "correcting" 6 drivers.
Ben
If you are not kidding, then I can't too strongly point out that is no way to run a negative feedback system with something as flakey as a sub driver (well, as compared to a well-behaved electric component).
Drivers are complex mixes of forces working in funny art-and-science ways to make sound that sounds OK to our ears. Some of that truth is lost on folks with their noses deep into computer models which never allow for the reality that cone drivers are not well behaved.
But while it is certainly unorthodox design, it is possible some improvement might possibly arise with one sensor "correcting" 6 drivers.
Ben
Hi,
I had the 805sensors already on my radar. Especially the one with the stub would allow for simple mounting on a aluminum membrane.
Bandwidth is no isue since the operating bandwidth will be end well below 100Hz. After all my app is about a subwoofer
jauu
Calvin
I had the 805sensors already on my radar. Especially the one with the stub would allow for simple mounting on a aluminum membrane.
Sheer size verus compactness. Besides, the mentioned superlongthrow drivers not only demand considerably less cabinet volume at similar SPLmax, but are also low-THD and sonically already very well behaved. So well indeed that I´ve certain nagging doubts that there might no real improvement in MFing them. 😉 In the end there´ll always be two of the drivers mounted as to compensate fro their mechanical impulses. Two of the LMS-R15 are capable to shovel app. 7Liters of air and the LMS-Ultra5400 would be capable of throwing a full 10L bucket at You. 😉Why not use multiple drivers to distribute the load instead of trying of trying to do it all with one driver ?
Bandwidth is no isue since the operating bandwidth will be end well below 100Hz. After all my app is about a subwoofer
jauu
Calvin
Last edited:
David,Also your LMS may not need much feedback at all 😉
As you previously noted, the IPAL motional feedback system (differential pressure feedback loop control Integrated Powered Adaptive Speaker) does little in the way of improvement in distortion in the very low distortion B&C woofers used.
Woofers like the B&C, and TMS Ultra 5400 already have single digit distortion figures when used within Xmax, and most people have a hard time detecting low frequency distortion of less than 10% .
The reduction of low frequency distortion from 5% to 1% or 2% is well beyond what my hearing is capable of detecting.
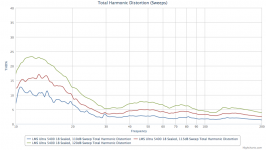
The reduction of THD at 20 Hz from 27.6% to 1.3%, and 67.5% at 15 Hz to 1.6% your motional feedback system achieves with a speaker that produces loads of distortion below it's resonant frequency is impressive, but begs the question of whether your system cost with a (presumably) cheap driver can be sold for the cost of a more expensive low distortion driver ?
Art
Let's just talk about distortion.
For amps, enthusiasts go nuts to make improvements that are two orders of magnitude less than the best speakers today. Illogical to argue that on their part, I'd say, but also illogical on Weltersys opposite part as well.
Anybody who has studied the history of hifi knows the historic trend to put the loop of feedback over more and more of the system. I am sure people said, "Why would I want to improve my Brooks amp?"
Some distortion is more musical (acceptable, unnoticable, even nice) compared to other distortion. Drivers make a variety of distortions, good and bad, including some that harm directional imaging.
MF provides cone control that is quite dramatic as anyone who has been exposed to a test can attest. Not all the benefits can be captured by harmonic distortion tests on sine waves. Granted, a woofer has a pretty lazy job, just working with low frequencies not tone bursts or pulses - but I think cone control matters a whole lot even for that job. For sure, MF provides a dramatic improvement in real realism (do you mistake it for the real thing "down the hall" test).
Ben
For amps, enthusiasts go nuts to make improvements that are two orders of magnitude less than the best speakers today. Illogical to argue that on their part, I'd say, but also illogical on Weltersys opposite part as well.
Anybody who has studied the history of hifi knows the historic trend to put the loop of feedback over more and more of the system. I am sure people said, "Why would I want to improve my Brooks amp?"
Some distortion is more musical (acceptable, unnoticable, even nice) compared to other distortion. Drivers make a variety of distortions, good and bad, including some that harm directional imaging.
MF provides cone control that is quite dramatic as anyone who has been exposed to a test can attest. Not all the benefits can be captured by harmonic distortion tests on sine waves. Granted, a woofer has a pretty lazy job, just working with low frequencies not tone bursts or pulses - but I think cone control matters a whole lot even for that job. For sure, MF provides a dramatic improvement in real realism (do you mistake it for the real thing "down the hall" test).
Ben
Last edited:
Ben,Let's just talk about distortion.
For amps, enthusiasts go nuts to make improvements that are two orders of magnitude less than the best speakers today. Illogical to argue that on their part, I'd say, but also illogical on Weltersys opposite part as well.
I have extensively tested various subwoofers using sine waves, which make it far easier to notice harmonic distortion than music.
Doing those tests I have found that although 10% distortion is noticeable, I can't really notice low frequency distortion of fundamental frequencies below around 80 Hz when the distortion falls below around 5% in a normal fashion, that is each higher harmonic is less than the previous.
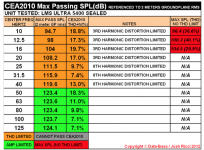
The only subwoofer distortion standard I know of, the CEA2010, allows up to 31.62% 2nd harmonic distortion.
http://personal.inet.fi/private/zipman/starobin_CEA2010.pdf
David's motional feedback system appears to make what would be an audible difference on the loudspeaker under test that he "would not recommend .. for HiFi use" though it looks like it would pass the CEA2010 without it.
Josh Ricci's sealed LMS 5400 exceeds the output level of the lowest distortion sub in the Jan 2006 CE2010 paper by some 28 dB.
Whether one uses an inherently low distortion sub or a high distortion sub with MF applied to achieve similar measured distortion, it seems illogical to pay more for something that does not make an audible difference.
As David wrote in post # 92 "your LMS may not need much feedback at all 😉".
Art
Attachments

{kind=link}
David,
As you previously noted, the IPAL motional feedback system (differential pressure feedback loop control Integrated Powered Adaptive Speaker) does little in the way of improvement in distortion in the very low distortion B&C woofers used.
Woofers like the B&C, and TMS Ultra 5400 already have single digit distortion figures when used within Xmax, and most people have a hard time detecting low frequency distortion of less than 10% .
The reduction of low frequency distortion from 5% to 1% or 2% is well beyond what my hearing is capable of detecting.
The reduction of THD at 20 Hz from 27.6% to 1.3%, and 67.5% at 15 Hz to 1.6% your motional feedback system achieves with a speaker that produces loads of distortion below it's resonant frequency is impressive, but begs the question of whether your system cost with a (presumably) cheap driver can be sold for the cost of a more expensive low distortion driver ?
Art
But you have overlooked one important factor and that is cost !!
In Australia one LMS5400 sells for about $1400AUD and $1000 USD in the US !!
I also address the issue of high frequency distortion which voltage drive does not fix and for which more expensive drivers like the LMS have to resort to using flux shorting rings etc. And then there is immunity to changes in voice coil resistance and inductance which is essentially achieved by using current feedback around the amplifier.
Then I add the following goodies 😉
- Room correction for the bass region using an 8 band parameter equalizer,
- User defined active crossover with either stereo 2-way with (dual servo) or mono 3-4 way with single servo,
- Balanced - Unbalanced input/outputs,
- Buffered loop thru to chain more subs together,
- RS-485 connection to network subs together,
- Interface to a low cost full color Quarter VGA LCD display with touch screen capability,
- Rotary level control and 5 button interface,
- Infra-red remote control capability,
- User friendly windows software for both designer and end-user with USB interface to the board,
- Firmware upgrade capability,
As you can see the board is more than just a servo system for a woofer 😉
With regards to the ability to hear low frequency distortion I don't buy those claims for one minute because most people don't own or have never heard low distortion bass so they have no way of comparing. Secondly I can even hear the differences on my bench here with the speaker mounted in free-air !! With the servo active the speaker is completely quiet compared to without the servo when it is producing lots of harmonics. It is at the higher sound pressure levels and displacement that a speaker usually produces more distortion and the ear is more sensitive to it. It is vital to clean up this distortion. I also compared distortion levels at 110Hz where the ear is much more sensitive and showed a 14 dB reduction alone !!
In any event if distortion was not an issue then there would be no need for an expensive driver such as the LMS and a 50 dollar car speaker could do the same job don't you think ? In fact why buy an LMSR-15 for $450 when you can buy a Lanzar MAXP154D off ebay for $60 ?
regards
david
Last edited:
- Status
- Not open for further replies.
- Home
- Loudspeakers
- Subwoofers
- Low distortion, DSP based high gain servo controlled woofer controller.