I spent all day thinking about it and decided to give the two sheets of melamine a try, I had some leftover IKEA shelves and I already have a long belt and pulley from an earlier idea. So far even without any grease or lubricant the spinning is considerably easier than the slewing ring. The belt is a bit long as it was sized for a 594mm disc and I didn't have anything quite that big in stock to cut a circle from that would spin.


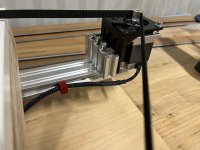
The belt driven version is alive. Due to the gearing it is much slower, but very smooth, I still need to work on what the gear ratio should be, the theoretical value is not quite enough. The good news is that it is repeatable backwards and forwards and comes back to zero nicely, although it takes it's own sweet time to do it 🙂 I had enough offcuts of aluminium extrusion and random fixtures and fasteners that I was able to make quite a nice tensioning setup with two bolts. I used 1/4 microstepping this time as it did reduce the vibration, it is a trade for electrical noise while the motor is moving but goes back to being virtually silent while stationary with holding current applied. I need to fix up the electronics in a separate enclosure as there isn't enough cable on the stepper to reach inside anymore. It is almost too heavy now which is not a bad thing for stability.
You can increase the max speed and acceleration.although it takes it's own sweet time to do it 🙂 I
Duncan, did you try a much heavier load yet (let's say 20 or 30 Kg) ?
And like Tom said, you can increase max speed and acceleration.
On mine, beside the heavy unpleasant noise when moving, it's not a problem when measurement is done, and by the way I have absolutely no noise when not moving (stepper energized or not).
And like Tom said, you can increase max speed and acceleration.
On mine, beside the heavy unpleasant noise when moving, it's not a problem when measurement is done, and by the way I have absolutely no noise when not moving (stepper energized or not).
I have changed the speed and acceleration but not by significant amounts, once I have the correct gear ratio worked out I can up the speed and see what it can do. Even at this speed it is still only 6 minutes for a 180 degree measurement set in 10 degree steps. My first concern was repeatability, were any steps being missed, that was what I ultimately didn't feel happy about the slewing bearing I had in the way I mounted it, it could get stuck. It's still not clear to me quite why that was happening.
I haven't tried a heavier load yet that is still to be done. The gearing of the belt should allow it to move a pretty heavy load without any issue.
I haven't tried a heavier load yet that is still to be done. The gearing of the belt should allow it to move a pretty heavy load without any issue.
I have calibrated the belt which turned out to be much more time consuming than I thought it would be. Marking a line dead straight through the centre of rotation and lining that up with a laser ended up being quite the game. I stuck with the 1/4 microsteps and upped the speed quite a lot. I now have ARTA set to pause for 4.5 seconds between measurements instead of 12. This also had the benefit of reducing vibration more. The overall noise is much less annoying. I can now rotate backwards and forwards between 0 and 180 degrees very accurately, at least within the tolerance of a laser line. The circle ended up being the equivalent of an 851 tooth pulley. Marking angles was too painful so I printed a marker scale for 5 degree increments between 0 and 90 degrees so I can check that everything is staying in check. Apart from building a platform to raise the DUT up and checking with heavy weights I am calling this done. I might add something to keep the belt where I want it to run if that is needed after I have got to use it for real.
Attachments





I have tested the turntable with as much weight as I easily had available, a 6Kg Kettle Bell, a bench vice, a bench grinder and a box of very heavy duty castor wheels. The Kettle bell is the lightest. The table moved them backwards and forwards from 0 to 90 and back again accurately, there was a small amount of motor strain heard but nothing much. 1/4 microsteeping seemed a good choice as trying full steps just ripped the belt around without moving the plate at all. The marker scale was a bit of a fail as it was hard to tell when it was lined up, I will have to try a different version of that idea.
Attachments


It's interesting that the microstepping helps with the load - good to know. I wonder what a good lubricant for melamine would be? Graphite? Dry Teflon lube?
Something else I wonder about is how well the speaker needs to be centered on the acoustic centers of the higher frequency drivers when doing CEA 2034 style measurements. With some speakers you would end up with a very asymmetrical and tough to move load if they were sitting on the approximate acoustic center.
Something else I wonder about is how well the speaker needs to be centered on the acoustic centers of the higher frequency drivers when doing CEA 2034 style measurements. With some speakers you would end up with a very asymmetrical and tough to move load if they were sitting on the approximate acoustic center.
No just some spray lithium grease. The top circle rotates around a central bolt and slides on the bottom sheet.Just for me to understand, you have no bearing at all in between the 2 melamine sheets ?
I think it depends on how flat the surfaces are. I tried PTFE spray and I didn't like it. The lithium spray grease was a good consistency and let the two surfaces slide nicely. It does add more friction, from some online calculations I ran, friction in the movement system is often what limits the ability to move a heavy load.I wonder what a good lubricant for melamine would be? Graphite? Dry Teflon lube?
When using programs like Vituix to process the measurements the point of rotation needs to at the baffle, not the acoustic centre of the speaker. That will mean that the load is off centre of the platform.Something else I wonder about is how well the speaker needs to be centered on the acoustic centers of the higher frequency drivers when doing CEA 2034 style measurements. With some speakers you would end up with a very asymmetrical and tough to move load if they were sitting on the approximate acoustic center.
I saw this idea to make the platform tilted to spread the load over the platform and I am going to give it a try.
https://www.audiosciencereview.com/...ematics-and-everything-else.9970/post-1207643
I have another use for the slewing bearing so before I give up on it completely I'm going to try an few different things to see it will work better for that use.
Here's some info I found on stepper motor sizing and gear ratios. Please take this with a grain of salt since I may not have properly grasped something.
1. For open loop motors (which is what we are using) it is generally recommended that the ratio of load inertia to rotor inertia (of the motor) be 10:1 or less. 5:1 is better, 1:1 is ideal(?).
2. With a gear reduction the motor sees "reflected inertia." A reduction drive reduces the inertial load by the square of the gear ratio and the inertia the motor sees is calculated as JReflected = ( JLoad / N^2 ) where N is the gear ratio and J is inertia.
So we want ( JLoad / N^2 )/JMotor to be less than 10. This dictates the maximum inertial load a motor can move.
I tried applying the math to the parts I've purchased and the motor not as strong as I would like given the reduction. I think can drive up to 50 lbs of speaker 1 ft off the axis of rotation. My drive ratio is 18:1, which I believe means the reflected inertia the motor sees is about 30 in-oz, which is ~10x the rotor inertia of the vexta motor I bought.
I want to have be able to drive heavier loads, so I'm going to use a different gearbox with a 20:1 reduction ratio and a Nema24 motor. With this setup I can drive a 300lb load with a 1:1 inertial ratio, which is much better. I could also drive a 3000lb load with a 10:1 inertial ratio, but this is obviously not needed. Of course this is 75% slower than the other gearbox, but with a maximum step rate of 50,000, the turntable will still turn 10 degrees in 0.1 seconds (ignoring acceleration).
1. For open loop motors (which is what we are using) it is generally recommended that the ratio of load inertia to rotor inertia (of the motor) be 10:1 or less. 5:1 is better, 1:1 is ideal(?).
2. With a gear reduction the motor sees "reflected inertia." A reduction drive reduces the inertial load by the square of the gear ratio and the inertia the motor sees is calculated as JReflected = ( JLoad / N^2 ) where N is the gear ratio and J is inertia.
So we want ( JLoad / N^2 )/JMotor to be less than 10. This dictates the maximum inertial load a motor can move.
I tried applying the math to the parts I've purchased and the motor not as strong as I would like given the reduction. I think can drive up to 50 lbs of speaker 1 ft off the axis of rotation. My drive ratio is 18:1, which I believe means the reflected inertia the motor sees is about 30 in-oz, which is ~10x the rotor inertia of the vexta motor I bought.
I want to have be able to drive heavier loads, so I'm going to use a different gearbox with a 20:1 reduction ratio and a Nema24 motor. With this setup I can drive a 300lb load with a 1:1 inertial ratio, which is much better. I could also drive a 3000lb load with a 10:1 inertial ratio, but this is obviously not needed. Of course this is 75% slower than the other gearbox, but with a maximum step rate of 50,000, the turntable will still turn 10 degrees in 0.1 seconds (ignoring acceleration).
- Home
- Loudspeakers
- Multi-Way
- Automatic Polar Measurements using ARTA, stepper motor and Tic Controller