I wonder if the 7P with a 10 degree tilt would smooth out the top a bit? I'm still very intrigued by this driver, I found the 10P nice overall but prefer a bit more top end (personal preference)
The Markaudio 10P seems to have a dramatically erratic response above about 5kHz.
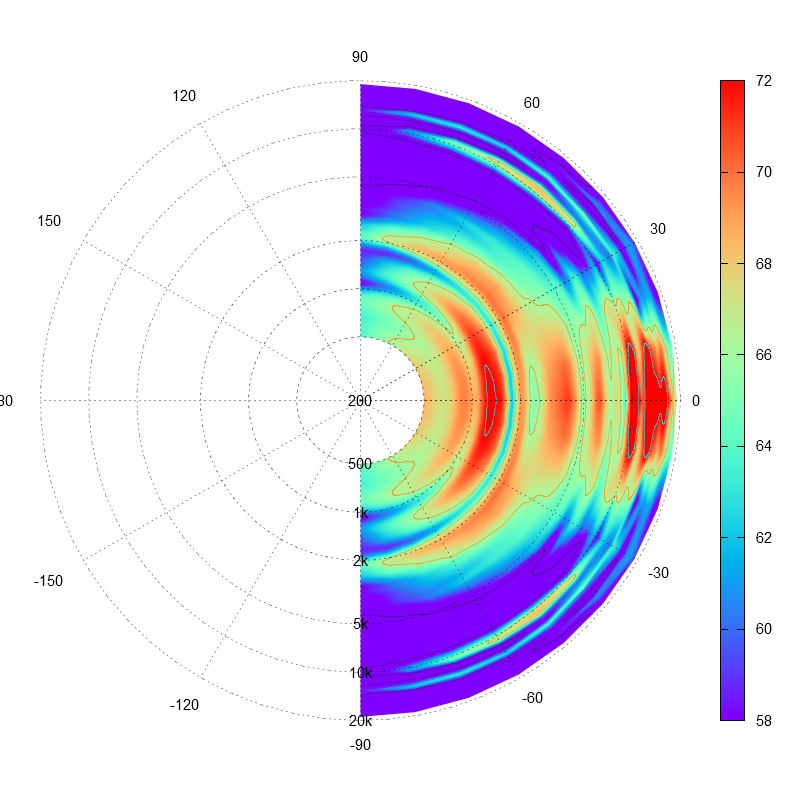
Mark Audio Alpair 10P-A Loudspeaker Measurements and Information
Tilting or toe-in of wide-band drivers somewhat helps balancing a rising on-axis frequency response. How good does it work? Measurements would tell.
Most wide-band drivers have a quite erratic response at higher frequencies and it gets worse off-axis. Small changes in listening position result in large response differences. Such response differences are a lot smaller on axis.
So toe-in seems to be just a band-aid. Equalizing the on-axis response is probably a better solution.
whenn a driver behave so badly in the HF, its time to think to cross it over to something more linear.Or do we need to have tone control at the preamp stage?
Or do we need to go for a preamp/amp which inherently have less prominent high frequencies to compensate the Alpair 7p?
Also one question, like why we can not find many diy amp/preamps systems having tone controls, and mostly with only volume control alone?
For what I remember, the MA 12p wasnt linear enough and not nearly enough resolving highs anyways no matter if it was linear or not.
I would have liked to experiment with xo around 5khz to a good (super)tweeter. that should help any HF problem
I would have liked to experiment with xo around 5khz to a good (super)tweeter. that should help any HF problem
If you are going to do that you might look at the A12pw
dave
whenn a driver behave so badly in the HF, its time to think to cross it over to something more linear.
For what I remember, the MA 12p wasnt linear enough and not nearly enough resolving highs anyways no matter if it was linear or not.
I don't think anyone else shares your opinion.😕
jeff
I don't think anyone else shares your opinion.😕
jeff
I do share his opinion.
If a driver's on-axis and off-axis response is distorted then you're left with four options. Use EQ, crossover to another driver, use a different driver that has less distortion or make yourself believe it would sound good the way it is.
The Markaudio 10P seems to have a dramatically erratic response above about 5kHz.
Mark Audio Alpair 10P-A Loudspeaker Measurements and Information
Tilting or toe-in of wide-band drivers somewhat helps balancing a rising on-axis frequency response. How good does it work? Measurements would tell.
Most wide-band drivers have a quite erratic response at higher frequencies and it gets worse off-axis. Small changes in listening position result in large response differences. Such response differences are a lot smaller on axis.
So toe-in seems to be just a band-aid. Equalizing the on-axis response is probably a better solution.
Those measurements if correct would be very audible (to me) especially the top end. There are other published measurements of this driver which are nothing like this.
If anything, the 10P is a very balanced sounding driver. I have them in floorstanding cabs 88cm high tilted back around 8 degrees to give a good overall balance across the frequency range
beaming is not really an issue imo
There are other published measurements of this driver which are nothing like this.
Could you please point me to those measurements?
Is there a thread about the 10P? Probably better to discuss it over there?
If someone has on axis or even 15 deg off axis measurements of the impulse response of any MA aluminum cone driver I would be interested in seeing. My one aluminum driver (an RS100-4) has a resonance breakup that is very metallic sounding and results in a ringing which is audible as sibillance. I am wondering if this is an inherent feature (problem) in aluminum cone full range drivers.
Bob provides measurements of the 7.3 on his site at 0, 10, 15, 30, 45 and 60 degrees off axis. You will also find there a variety of measurements of the 10M, 10P and 12P, the Fostex FF165wk and FF225wk.
Last edited:
If someone has on axis or even 15 deg off axis measurements of the impulse response of any MA aluminum cone driver I would be interested in seeing.
You would need to measure your RS100-4 if it has a similar off-axis peak around 10kHz.
X
I have posted a frequency response plot because the metallic sound might be a amplitude response issue and not a time domain error.
I have posted a frequency response plot because the metallic sound might be a amplitude response issue and not a time domain error.
X
I have posted a frequency response plot because the metallic sound might be a amplitude response issue and not a time domain error.
The freq response and time domain response are inextricably linked through the Fourier transform. You cannot have clean time domain with ugly frequency domain and vice versa. The time domain is the inverse Fourier transform of the frequency domain. So if you see a sharp 10khz peak in frequency, you MUST see a 100 uS period on a ringing oscillation.
The freq response and time domain response are inextricably linked through the Fourier transform. You cannot have clean time domain with ugly frequency domain and vice versa. The time domain is the inverse Fourier transform of the frequency domain. So if you see a sharp 10khz peak in frequency, you MUST see a 100 uS period on a ringing oscillation.
True. Now if we look at different angles we see different responses. Are they still linked in the same way, i.e. will correcting phase by correcting amplitude and vice versa also correct magnitude and phase at other angles?
Hi pnix, could you please elaborate on the graph? For example, what driver, etc.?
This is a Markaduio Alpair 7.3. Not sure what you're specifically interested in so please ask more questions.
True. Now if we look at different angles we see different responses. Are they still linked in the same way, i.e. will correcting phase by correcting amplitude and vice versa also correct magnitude and phase at other angles?
At any measurment, the frequency and time domain and phase will all be consistent. So you may have ringing in time domain for one angle but not another. The fundamental info is the time domain and phase info that comes with it. High end test systems actually do a bunch of real impulse measurments and calculate the frequency response from that. Measuring frrquency sweep is easier as you timing requirements is not as critical.
Last edited:
Hi pnix, was this on a standard IEC baffle? Also, could you say at what distance, and whether the mike is calibrated? Thank you in advance.
At any measurment, the frequency and time domain and phase will all be consistent. So you may have ringing in time domain for one angle but not another.
That's why I've posted polar data. Response on listening axis is important but the response off axis is equally important.
The fundamental info is the time domain and phase info that comes with it. High end test systems actually do a bunch of real impulse measurments and calculate the frequency response from that. Measuring frrquency sweep is easier as you timing requirements is not as critical.
It is my understanding that most measuring software these days uses the swept sine technique which calculates an impulse response from a sine sweep recording. Magnitude and phase is calculated from that impulse response.
Hi pnix, was this on a standard IEC baffle? Also, could you say at what distance, and whether the mike is calibrated? Thank you in advance.
Driver was mounted in a small box. Mic distance about 3'. Calibrated mic. Reflections were gated out.
You would need to measure your RS100-4 if it has a similar off-axis peak around 10kHz.
Can you post the Impulse response at 0deg, 15deg, 30deg, 45deg? I can't extract that a polar contour plot as you present. Looks nice but to me, appears to not be smooth and have lots of peaks and dips.
- Status
- Not open for further replies.
- Home
- Loudspeakers
- Full Range
- Why bother with FRs?