Hey everyone
Posting here as may suit this group more due to its lack of off the shelf drivers in use. In this video I use 2 of my own 3D printed drivers, and run them in a printed 2-way bookshelf cabinet and compare it to a entry level bookshelf speaker.
Aim of the video is to see where printed drivers and cabinets are when comparing then to industry ones, and what areas need improving.
YouTube
Paul")
Posting here as may suit this group more due to its lack of off the shelf drivers in use. In this video I use 2 of my own 3D printed drivers, and run them in a printed 2-way bookshelf cabinet and compare it to a entry level bookshelf speaker.
Aim of the video is to see where printed drivers and cabinets are when comparing then to industry ones, and what areas need improving.
YouTube
Paul
Thanks WrineX. Im on a long journey to achieving industry performance levels, and just don't feel there is much to go on when it comes to learn this stuff, and seeing the effects some parts have. Hence making videos detailing what I find and what needs work.
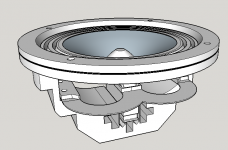
Next video should be diving into WF81's surround and spider, and using some CAE to aid the design of these components. I have a new born baby here though too, so not sure on the ETA. Here is a render of the revised driver though. Thanks for your interest
Paul
Next video should be diving into WF81's surround and spider, and using some CAE to aid the design of these components. I have a new born baby here though too, so not sure on the ETA. Here is a render of the revised driver though. Thanks for your interest
Paul
Attachments

Thanks WrineX. Im on a long journey to achieving industry performance levels, and just don't feel there is much to go on when it comes to learn this stuff, and seeing the effects some parts have. Hence making videos detailing what I find and what needs work.
Next video should be diving into WF81's surround and spider, and using some CAE to aid the design of these components. I have a new born baby here though too, so not sure on the ETA. Here is a render of the revised driver though. Thanks for your interest
Paul
i hope you do know ur talking to the same guy ur talking to on facebook
haha Joppe here Hello there.
I was watching your videos, and I think you could probably increase the performance of the speaker by reducing the surface area of your spider and basket. Rear speaker reflections can cause a lot of speaker distortion. Not to mention that your current spider looks like it might be causing too much drag on the cone.
Here is the spider from the DIY field coil speaker for inspiration. Good luck and keep up the good work. I am excited for the next video.
[Project Ryu] New Spider Concept Material Resistance - YouTube
I was watching your videos, and I think you could probably increase the performance of the speaker by reducing the surface area of your spider and basket. Rear speaker reflections can cause a lot of speaker distortion. Not to mention that your current spider looks like it might be causing too much drag on the cone.
Here is the spider from the DIY field coil speaker for inspiration. Good luck and keep up the good work. I am excited for the next video.
[Project Ryu] New Spider Concept Material Resistance - YouTube
This is some Very Cool Stuff !!!
I had started thoughts on this kind of thing a few years ago as well when I First got my printer and discovered some new materials that are now fluently available.
I am more interested in what you are using for the spider and surround materials and way's that they might be tuned.
My goal is to 3D print my Desktop ESL frames with the resistor dividers encapsulated in the frames possibly made from some conductive filament and a matching woofer as well.
I am not much too concerned about cone break as I cross them over well below that point anyhow.
What I am interested in is LF performance, namely THD at the lower end, your preliminary test show very promising results so far, better than many of the commercial drivers that I have here and have tested in free air.
My criteria is it has to be small but still have a lot of displacement overall.
IE~ Multiple driver's in a small box in a dipole configuration.
Kind of like an ESL AMT configuration as discussed quite a while back.
The main reason I never got on this was (as I recently discovered) the reason why we quit using the thing ................
My extruder failed after a year or two or so worth of beating it up printing stupid crap like Fish's and Turtles and stuff.
Plus I never got around to properly calibrating the thing as well so one side was always elongated.
After 6 Arduino and Rpi cases that did not fit right I gave it up for a while, then the extruder failed.
Anyhow, I got it set back up and doing the repairs as we speak.
Cheers !!!

jer
I had started thoughts on this kind of thing a few years ago as well when I First got my printer and discovered some new materials that are now fluently available.
I am more interested in what you are using for the spider and surround materials and way's that they might be tuned.
My goal is to 3D print my Desktop ESL frames with the resistor dividers encapsulated in the frames possibly made from some conductive filament and a matching woofer as well.
I am not much too concerned about cone break as I cross them over well below that point anyhow.
What I am interested in is LF performance, namely THD at the lower end, your preliminary test show very promising results so far, better than many of the commercial drivers that I have here and have tested in free air.
My criteria is it has to be small but still have a lot of displacement overall.
IE~ Multiple driver's in a small box in a dipole configuration.
Kind of like an ESL AMT configuration as discussed quite a while back.
The main reason I never got on this was (as I recently discovered) the reason why we quit using the thing ................
My extruder failed after a year or two or so worth of beating it up printing stupid crap like Fish's and Turtles and stuff.
Plus I never got around to properly calibrating the thing as well so one side was always elongated.
After 6 Arduino and Rpi cases that did not fit right I gave it up for a while, then the extruder failed.
Anyhow, I got it set back up and doing the repairs as we speak.
Cheers !!!
jer
Last edited:
Hello there.
I was watching your videos, and I think you could probably increase the performance of the speaker by reducing the surface area of your spider and basket. Rear speaker reflections can cause a lot of speaker distortion. Not to mention that your current spider looks like it might be causing too much drag on the cone.
Here is the spider from the DIY field coil speaker for inspiration. Good luck and keep up the good work. I am excited for the next video.
[Project Ryu] New Spider Concept Material Resistance - YouTube
Hey man. Thanks for the reply and I have seen the Ryu project for a long time. Even investigated the field coil as a option for a motor but the size of my drivers don't really match due to there size and the motor width I am using.
As for the spider, yes it would lower mass for sure. I have had flat spring based spiders for this reason before but again, at the size of the drivers I am making, they have not resulted in suitable performance. The issues where with TPU it is too soft, and with more rigid materials I would get fatigue fractures. I may have to dabble more at a later date!
I have added pictures of just a couple of the many flat designs I have tried in the past for you. Any other ideas, please feel free to mention them. With 3D printing, we have potential designs and ideas other methods may not have the luxury off, and thanks for watching. I am trying to share some data and experiences as things develop
- Paul
Attachments

This is some Very Cool Stuff !!!
I had started thoughts on this kind of thing a few years ago as well when I First got my printer and discovered some new materials that are now fluently available.
I am more interested in what you are using for the spider and surround materials and way's that they might be tuned.
My goal is to 3D print my Desktop ESL frames with the resistor dividers encapsulated in the frames possibly made from some conductive filament and a matching woofer as well.
I am not much too concerned about cone break as I cross them over well below that point anyhow.
What I am interested in is LF performance, namely THD at the lower end, your preliminary test show very promising results so far, better than many of the commercial drivers that I have here and have tested in free air.
My criteria is it has to be small but still have a lot of displacement overall.
IE~ Multiple driver's in a small box in a dipole configuration.
Kind of like an ESL AMT configuration as discussed quite a while back.
The main reason I never got on this was (as I recently discovered) the reason why we quit using the thing ................
My extruder failed after a year or two or so worth of beating it up printing stupid crap like Fish's and Turtles and stuff.
Plus I never got around to properly calibrating the thing as well so one side was always elongated.
After 6 Arduino and Rpi cases that did not fit right I gave it up for a while, then the extruder failed.
Anyhow, I got it set back up and doing the repairs as we speak.
Cheers !!!
jer
Hey man. Thanks for your interest, and yeah I got my 3D printer in 2015 and started this idea back in early 2016 with FD61. That resulted in a decent attempt, but was a failed kickstarter, and was a big learning curve.
What I had not done well up to that point was documented data well and in a scientific manner. That and the Kickstarter not doing well because well....no one knew about it, me or what it was capable off, so I started some open source designs and my Youtube channel to look at different things.
I don't class myself as being a expert by any means, so I share what I find, and keep an open mind throughout. This year has definitely be better in improving performance and my understanding. The ultimate goal is to make my own driver which is competitive and can also be assembled by the end user. I also want to have the option for people with printers however to have a model they can make there own as well.
LF performance has been worked on a lot so far, but I do think there is still more to go. Also as we scale to a more suitable magnet motor with the right strength, we should also get a improvement from this as well. Time will tell!
Spider and Surround material used currently is Polymaker TPU95. It gives me a low Qms and consistent printing quality, which is essential. I have tried a few other materials, and chose this one, but I will continue tests with other materials as well.
As for your goals, my motors are very unorthodox and for your small driver, big displacement I would probably suggest attempting your own path with a more traditional motor. Having a focus on full range, displacement hasn't been a big concern. WF81 was the exception which came about from my Patreon supporters who wanted it.
I wish you the very best of luck, and don't hesitate to ask anything else. Tenacious 6 is my last open source driver this year, and after that things will be on Patreon only, but I do plan to continue videos on driver design and the effects. One video idea is with and without copping shorting, and the benefits and downfalls of both approaches.
- Paul
"What I had not done well up to that point was documented data well and in a scientific manner."
I know where you are at with this one, when I built my system I did not have a dedicated thread on it so my data is spewn all across several threads and makes it quite difficult at times to convince others of my methodology.
Not to mention how time consuming it is to make a part just to find out within a few seconds if it is gonna work or not and then present the data as to why.
I went through this when I did a study on high performance ESL coatings and still have data I never posted, I just posted the final results and said hey this works, works really good and never took it any farther than that.
You are on the right track and it takes a lot of patients to do such work on ones own, KickStarters don't work unless you already have a working product to present, Pateron I know nothing about but I too will look in to this myself sometime in the near future.
Thank you for the heads up on a materiel to start with, at least this will give me something to start with as there is now a vast majority of stuff to choose from now days.
Motor design, well that is another whole entity within itself, at this point having something that works is my main goal and making it more efficient comes later, I have some servo techniques I wish to try and employ once I get to that point, but it is gonna be a long while before I get there anyhow.
This is the sort of cutting edge stuff that Inspires me to keep going !!
Keep up the great work you have going on here and keep the details coming when you can.
jer
I know where you are at with this one, when I built my system I did not have a dedicated thread on it so my data is spewn all across several threads and makes it quite difficult at times to convince others of my methodology.
Not to mention how time consuming it is to make a part just to find out within a few seconds if it is gonna work or not and then present the data as to why.
I went through this when I did a study on high performance ESL coatings and still have data I never posted, I just posted the final results and said hey this works, works really good and never took it any farther than that.
You are on the right track and it takes a lot of patients to do such work on ones own, KickStarters don't work unless you already have a working product to present, Pateron I know nothing about but I too will look in to this myself sometime in the near future.
Thank you for the heads up on a materiel to start with, at least this will give me something to start with as there is now a vast majority of stuff to choose from now days.
Motor design, well that is another whole entity within itself, at this point having something that works is my main goal and making it more efficient comes later, I have some servo techniques I wish to try and employ once I get to that point, but it is gonna be a long while before I get there anyhow.
This is the sort of cutting edge stuff that Inspires me to keep going !!
Keep up the great work you have going on here and keep the details coming when you can.
jer
- Status
- This old topic is closed. If you want to reopen this topic, contact a moderator using the "Report Post" button.
- Home
- Loudspeakers
- Planars & Exotics
- 3D Printed Drivers FD51 + WF81 2-way vs Industry Bookshelf