It is. Can you post just the cal file -- don't confuse us with the B80 -- and 1 dB scale.
On 1st look it looks like -- if the PE cal file is still valid something like a 5dB peak on the Zoom at 8k on 1st glance.
dave
On 1st look it looks like -- if the PE cal file is still valid something like a 5dB peak on the Zoom at 8k on 1st glance.
dave
The 5dB high 7.8kHz peak in the data is a feature of B80. Both mics are within 1.5dB uncorrected. The cal file shows about +0.5dB correction should be applied to the UMM-6 raw at 6.8kHz. This would make both mics measure spot on at 7.8kHz, with the Zoom actually be more naturally accurate there. All this complaining about whether or not mics are valid seems moot given the small differences.
I'm adding the cal file to the response of the Zoom. It doesn't matter what the B80 does, you take the difference of the earlier B80 graphs with the Zoom & the UMM6 and then add the cal file.
dave
dave
I'm adding the cal file to the response of the Zoom. It doesn't matter what the B80 does, you take the difference of the earlier B80 graphs with the Zoom & the UMM6 and then add the cal file.
dave
That makes no sense. The cal file is for the UMM-6. I only used the B80 as a convenient noise source for pink noise because it happened to be hooked up.
The pink noise comparison plot shows both mics measuring the same thing without any calibration:
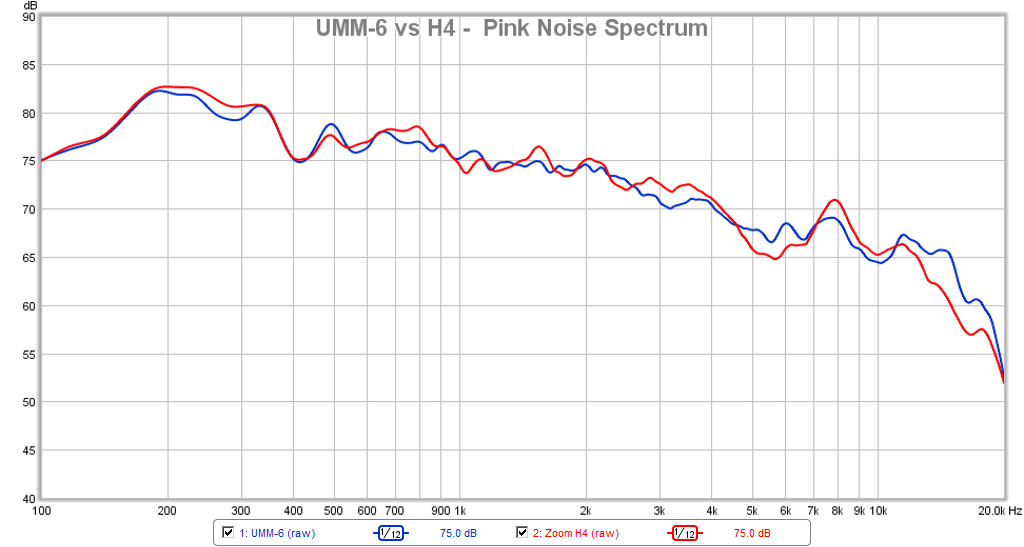
Anyone else looking at the above graph will say, that Zoom H4 and UMM-6 mics are pretty close. I think I can trust the sound clips as being a close approximation of what the UMM-6 is measuring.
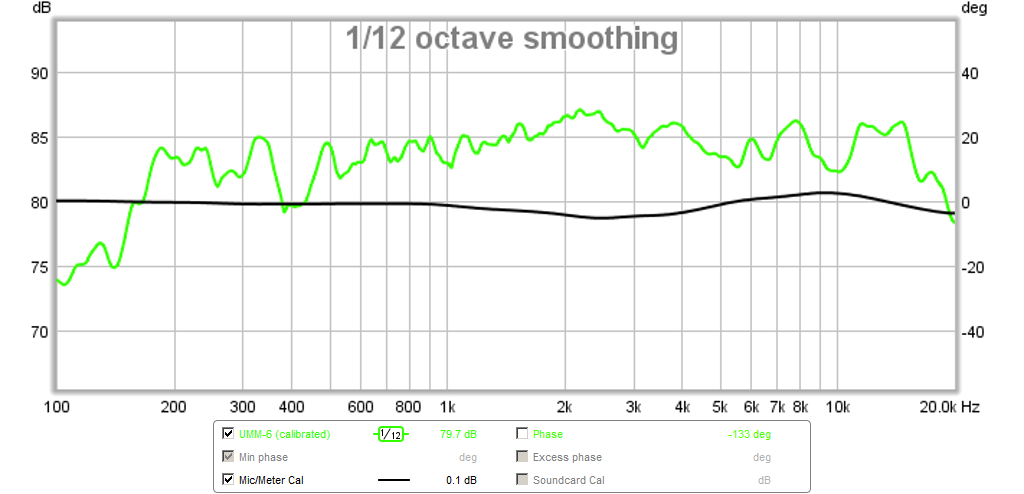
The second plot with the B80 and cal file was there just so I could show you the cal file. Ignore the B80 plot. The cal file is a flat line that wiggles up and down by 1.5dB at most.
The cal was for the UMM-6 but go ahead and apply it to the Zoom - so it changes it in places by 1.5dB. Big deal. We are talking about much bigger things when it comes to the dips and peaks that give these drivers their voice. By wanting to apply it to the Zoom does what though?
I have had enough of this. Just as I thought - Does not matter what objective evidence I give you - you will always have more stuff to whine about. Everyone can see this.
Last edited:
That makes no sense. The cal file is for the UMM-6.
It makes perfect sense. You used the raw response of the UMM-6 as a reference for the Zoom. To know the response of the Zoom, we need to compare it to the flat response of the UMM6. So we subtract the cal file from the UMM-6 response, assume that is flat (ie assume the cal file is correct for the UMM6 at this time) and look at the difference between the flattened UMM6 and the Zoom. This is the same as adding the cal file to the difference of the raw responses.
so it changes it in places by 1.5dB
If you look at 8k, we have the calfile at +1.5-2 dB (hardto tell without a better scale), and the Zoom above the UMM6, 3-4 dB. This gives the Zoom about a 5 dB peak at 8k. That is not relevant?
That is just looking at one spot.
Makes nodifference what speaker you use to create the relative responses.
dave
UMM-6 Cal File
The cal at 8k is about +0.85dB. Meaning, at 8k, Zoom is about 1.5dB greater than UMM-6. If you apply +0.85dB cal to raw UMM-6, you get the Zoom and UMM-6 to match within less than 0.5dB. I don't see the problem, in fact, it all looks very good to me.
The cal at 8k is about +0.85dB. Meaning, at 8k, Zoom is about 1.5dB greater than UMM-6. If you apply +0.85dB cal to raw UMM-6, you get the Zoom and UMM-6 to match within less than 0.5dB. I don't see the problem, in fact, it all looks very good to me.
Attachments
Last edited:
That's really rather nice, the only thing missing would be a BSC circuit, but other than that it looks like it'd be quite listenable.
Yes, the Visaton B80 does look pretty good. Maybe not as flat as the TC9/TG9FD or SS 10F, but for being the most expensive ($160) driver of all the drivers tested, it should be rather good.
The cal at 8k is about +0.85dB. Meaning, at 8k, Zoom is about 1.5dB greater than UMM-6. If you apply +0.85dB cal to raw UMM-6, you get the Zoom and UMM-6 to match within less than 0.5dB. I don't see the problem, in fact, it all looks very good to me.
With the cals i have you subtract the cal curve. I put the difference between UMM6 & Zoom at 8k at at least 3 dB. Higher rez graphs with more graticles would be useful.
Given the age of the mic a fresh cal would be nice.
Something like the attached.
dave
Attachments

To be fair, the mic cal really needs to be EQ'd out. +0.85dB is audible when over a large frequency range. Shouldn't be hard to correct that mic curve with a few PEQ points on the miniDSP.
Mic cal is for (frequency response) measurement mic UMM-6. Zoom H4 mic has no cal and records 96kHz 24bit WAV sound clips as is (raw). There seems to be confusion as to which mic is used for which purpose.
The point of this figure is to show that the mic for the Zoom H4 is not some totally unknown element in the audio signal train. It is in fact, quite similar to the mic used for the frequency response measurements. Anyhow looking at the following graph should see that there is not an issue with the sound clips presented as "misleading" or far from the truth of what the reality is of how they sound.
The point of this figure is to show that the mic for the Zoom H4 is not some totally unknown element in the audio signal train. It is in fact, quite similar to the mic used for the frequency response measurements. Anyhow looking at the following graph should see that there is not an issue with the sound clips presented as "misleading" or far from the truth of what the reality is of how they sound.
Last edited:
So the with the pink noise comparison graphs this is the raw response without any calibration files applied to either microphone.
If this is the case then if you apply the calibration file for the UMM6 to the UMM6s response then we would have a useful comparison.
In that way we'd have a measurement of the B80 with a fully calibrated system (UMM6 + calibration file) and a measurement of the B80 with a non calibrated system, the Zoom.
Given the two all you'd need to do is subtract the calibrated systems response from the uncalibrated systems response and you'd create a correction file for the uncalibrated system. Or do the subtraction the other way around depending on the requirements for the correction file.
If this is the case then if you apply the calibration file for the UMM6 to the UMM6s response then we would have a useful comparison.
In that way we'd have a measurement of the B80 with a fully calibrated system (UMM6 + calibration file) and a measurement of the B80 with a non calibrated system, the Zoom.
Given the two all you'd need to do is subtract the calibrated systems response from the uncalibrated systems response and you'd create a correction file for the uncalibrated system. Or do the subtraction the other way around depending on the requirements for the correction file.
To be fair, the mic cal really needs to be EQ'd out. +0.85dB is audible when over a large frequency range. Shouldn't be hard to correct that mic curve with a few PEQ points on the miniDSP.
Yes, but this is only part of solution since X's preference for recording clips based on his live experience is using Zoom H4.
1) record IR of a finished system with UMM-6 at point Zoom H4 will be used for sound clips.
2) further EQ system such that UMM-6 response without calibration file applied matches response from 1)
3) substitute Zoom H4 into recording position used in 1) and measure system response at same sample rate used with UMM-6.
4) EQ system response so that Zoom H4 response matches results from 1)
The above is core of microphone referencing by substitution using a known microphone (UMM-6 with calibration file applied) and unknown microphone (Zoom H4's two microphones).
When there in no known calibration, starting point is using reciprocity technique using transducers that may be used both as a speaker, and as a microphone. Typically in NIST and other standard laboratories 1" and 1/2" metal diaphragm elements are used with 200 volt biasing. Anechoic chamber is required, this too goes through extensive analysis. Labs regularly exchange results, and transducer elements. From here electret condenser microphones are then calibrated using substitution method.
Herb Singleton of Cross-Spectrum labs uses NIST traceable calibrated microphones in his own anechoic chamber, meaning that he uses third party calibration service that maintains certification with NIST lab, which is very expensive. Dayton Audio likely uses similar setup, along with Earthworks, and all the other makers of measurement microphones supplied with calibration data.
Earthworks also employs a proprietary spark gap generator capable of producing a very highly consistent impulse that behaves as tiny point source. Earthworks microphone capsules are also proprietary design electret capsules with a shaped back plate that compensates for charge redistribution caused by curvature change of electret diaphragm's non-pistonic behavior. The phantom power serves only to power microphone's amplifier, which of course is tailored to capsule behavior. Result culminate in ruler flat behavior of their measurement microphones.
Use of IR convolution with music for remote demo is very useful technique, at least when speaker is driven in its comfort zone. IR is linear response; convolution excludes HD and IMD behavior of speaker other than the small amplitude changes that these induce in the frequency response when total distortion is pushed to higher levels. This is useful in itself; music clips may be recorded at different drive levels, then all normalized to same level for analysis with headphones and compared to IR convolution results. These experiences validate the usefulness of IR convolution as a great remote blind demo technique; or for remote audition using preferred listening material.
I've done some high SPL listening with my radial array and listened to the recorded results, and can conclude with confidence that my ears distort a lot more than the speakers at elevated listening levels. As enjoyable as some music is when played loud, I limit myself to no more than a few minutes at a time, and seldom do so.
are awesome, please continue. Thanks to everyone, especially to xrk971 for the commendable work done on various 3ads
Yes, but this is only part of solution since X's preference for recording clips based on his live experience is using Zoom H4.
1) record IR of a finished system with UMM-6 at point Zoom H4 will be used for sound clips.
2) further EQ system such that UMM-6 response without calibration file applied matches response from 1)
3) substitute Zoom H4 into recording position used in 1) and measure system response at same sample rate used with UMM-6.
4) EQ system response so that Zoom H4 response matches results from 1)
The above is core of microphone referencing by substitution using a known microphone (UMM-6 with calibration file applied) and unknown microphone (Zoom H4's two microphones).
When there in no known calibration, starting point is using reciprocity technique using transducers that may be used both as a speaker, and as a microphone. Typically in NIST and other standard laboratories 1" and 1/2" metal diaphragm elements are used with 200 volt biasing. Anechoic chamber is required, this too goes through extensive analysis. Labs regularly exchange results, and transducer elements. From here electret condenser microphones are then calibrated using substitution method.
Herb Singleton of Cross-Spectrum labs uses NIST traceable calibrated microphones in his own anechoic chamber, meaning that he uses third party calibration service that maintains certification with NIST lab, which is very expensive. Dayton Audio likely uses similar setup, along with Earthworks, and all the other makers of measurement microphones supplied with calibration data.
Earthworks also employs a proprietary spark gap generator capable of producing a very highly consistent impulse that behaves as tiny point source. Earthworks microphone capsules are also proprietary design electret capsules with a shaped back plate that compensates for charge redistribution caused by curvature change of electret diaphragm's non-pistonic behavior. The phantom power serves only to power microphone's amplifier, which of course is tailored to capsule behavior. Result culminate in ruler flat behavior of their measurement microphones.
Use of IR convolution with music for remote demo is very useful technique, at least when speaker is driven in its comfort zone. IR is linear response; convolution excludes HD and IMD behavior of speaker other than the small amplitude changes that these induce in the frequency response when total distortion is pushed to higher levels. This is useful in itself; music clips may be recorded at different drive levels, then all normalized to same level for analysis with headphones and compared to IR convolution results. These experiences validate the usefulness of IR convolution as a great remote blind demo technique; or for remote audition using preferred listening material.
I've done some high SPL listening with my radial array and listened to the recorded results, and can conclude with confidence that my ears distort a lot more than the speakers at elevated listening levels. As enjoyable as some music is when played loud, I limit myself to no more than a few minutes at a time, and seldom do so.
Barleywater,
As usual, you have some exellent constructive advice and tips full of great scientific method principles applied. I will see what I can do - seems like work though all this PEQ massaging of the response for mic substitution method - but let's an unknown mic behave like a known a calibrated mic. Very cool. Thanks
are awesome, please continue. Thanks to everyone, especially to xrk971 for the commendable work done on various 3ads
You are welcome and Thanks!
Took me a while to figure out what 3ads meant 🙂
This new generation of texters is too much for my old brain sometimes.
- Status
- Not open for further replies.
- Home
- Loudspeakers
- Multi-Way
- Pros and Cons of Remote Subjective Blind Auditioning of Drivers