That's what I was getting at a while back! Great minds think alike 😁but the topology of the correction parts in the FF/FB-loop, being either FF or FB!
Functionally (at least in the case of audio), for the most part, they do a lot of the same things. Is it just a different way of doing things? Is there greater efficiency? Greater clarity?I guess the part that I don't get is: it seems like a lot of things you can do in feedforward you can implement in feedback much easier. Is there any benefit to using a feedforward technique as opposed to a feedback one?
Also I agree. I like how this topic turned out. Good discussion 🙂
My last post, second quote. I was agreeing with your conclusion. That's why I was asking about feedforward vs feedforward in terms of functionality.
What and where were you getting that a while back?That's what I was getting at a while back! Great minds think alike
Do not refer to your posting (I have noticed that second quote), but to that 'while back'! What? Where?
That really depends.The trick is to make the feedforward and feedback work together while having a stable system. That's not an easy task.
Tom
Feedforward control usually doesn't affect stability.
What works very well, is the combination of bringing the feedforward control values roughly close to what is desired, and let the feedback loop control the last little bit.
That way it brings a lot less stress on the feedback loop, and thus actually increasing stability.
Some heating/cooling systems work this way. (I have experimented and designed those a VERY long time ago)
The downside of feedforward loops, is that they work on expected values and assumptions.
Or in other words, they don't work well when a system will change in a (very) unpredictable way.
Or even another way of saying that, they don't have a clue about the output value.
In audio applications the combination of both work well in something like increasing the performance of a ADC/DAC.
Mostly because there is kinda a minimum value that can always be compensated for plus the performance usually doesn't change drastically with a different load.
I have seen this on a couple of devices actually.
edit:
This is a good practical example actually;
https://www.edn.com/feed-forward-principle-cancels-waveform-distortion/
Found some good reading. Enjoy!
Or in one specific single loudspeaker system when you throw an awful lot of math at it.
This is only a case by case solution.
Last edited:
The fundamentally are extremely different, so therefor also the goal CAN be very different.I see feed-forward and feedback as two ways to accomplish the same goal, which is Vout = A*Vin.
In some cases we don't want Vout = K * Vin
But in most cases the entire system will add some additional unwanted stuff in between that we want to get rid of.
So it's not a question of accomplishing the same, the question is about how to get rid of that unwanted stuff.
There are maybe a couple of different common topologies people may be thinking of when it comes to feedforward.
One is 'feedforward control,' the other is 'cascade of integrators.'
One applied example of the latter in the sampled time domain:

Please see attached for some more details.
EDIT: Some supplementary material:
https://web.engr.oregonstate.edu/~webbky/ESE499_files/Section 5 Block Diagrams.pdf
https://www.benardmakaa.com/wp-content/uploads/2018/05/Block-Diagram-Transformation-Theorems.pdf
EDIT 2: Someone worked out the equations for some higher order modulators (noise shapers):
https://sourceforge.net/p/playpcmwin/wiki/PCMtoSDM/
One is 'feedforward control,' the other is 'cascade of integrators.'
One applied example of the latter in the sampled time domain:
Please see attached for some more details.
EDIT: Some supplementary material:
https://web.engr.oregonstate.edu/~webbky/ESE499_files/Section 5 Block Diagrams.pdf
https://www.benardmakaa.com/wp-content/uploads/2018/05/Block-Diagram-Transformation-Theorems.pdf
EDIT 2: Someone worked out the equations for some higher order modulators (noise shapers):
https://sourceforge.net/p/playpcmwin/wiki/PCMtoSDM/
Attachments
Last edited:
No, one just describes the type of loop or control, the other is just a mathematical element.One is 'feedforward control,' the other is 'cascade of integrators.'
There are only two fundamental loops, either feedforward or feedback (seen from the total output)
An integrator can still be part of a feedforward loop.
There are also so called nested loops.
So a feedback loop within a feedforward loop etc etc etc
Yeah, you're right. I was trying to get at the difference between the above and something like this (where there are two independent inputs):

Last edited:

I guess the part that I don't get is: it seems like a lot of things you can do in feedforward you can implement in feedback much easier. Is there any benefit to using a feedforward technique as opposed to a feedback one?
If you follow the recursive flow in an amplifying stage with negative feedback: non-linear open loop gain causes intermodulation side bands as the input signal and -error are summed together. For a cyclical input signal like a sine wave, the side bands become a spray of harmonics + a possibility of DC offset.
For feed-forward, error correction could be of a low order like 1 pass. So the open loop output could be measured only once, aka calibration or tuning, and an error correcting stage subtracts harmonics in parallel.
Example: a complementary pair of MOSFETs in an output stage support each other in parallel, and they may be adjusted in a one-time operation for minimum distortion.
I studied the subject at least a few decades ago, as it was then anyway. The problem in the present context is there is a mixed readership here. Many or most people are not going seriously study the math of it. So the question is, how to make the subject more intuitive? more accessible to more people?I would rather advice a good book about control theory.
Trying to find a way to do that would seem to require the use of natural language with its uncertainties and ambiguity. Admittedly, I started writing before going back and reviewing the subject which led to some misuse of terms. Okay, my bad.
So, the question I have for you is how well can you explain in plain English more about feedforward than something like a simple observation to the effect that it usually doesn't affect stability? Is that the most intuition that can be shared?
Classic op-amps NE5532, 5534 and LM318 employ a form of feed forward circuit to improve performance. The feed-forward cap bypasses the slower VAS stage. I think Walt Jung discusses them in his book on op-amps.
https://www.ti.com/lit/an/snoa646/snoa646.pdf
https://www.ti.com/lit/an/snoa646/snoa646.pdf
I think there are some books that aren't that heavy on the math?Many or most people are not going seriously study the math of it. So the question is, how to make the subject more intuitive? more accessible to more people?
To understand the general concept, one basically can skip most of the math.
I mean, it's necessary to solve these problems, but not really needed to understand what's going on, on an higher level.
If you know what I mean 🙂
I would argue that feedback is also a way of getting rid of unwanted stuff. Feed-forward is great if you know what the unwanted stuff is. Then you can 'just' subtract it from the output.So it's not a question of accomplishing the same, the question is about how to get rid of that unwanted stuff.
Tom
Ok so I want to see if I get this, because I feel this could do wonders for my design.
This is my current preamp design (work in progress a lot of parts are place holders). I used the design @b_force said was a good example and tried to integrate it with my own. Would this be an implementation of feedforward (the circled part)?edit:
This is a good practical example actually; https://www.edn.com/feed-forward-principle-cancels-waveform-distortion/
Or in one specific single loudspeaker system when you throw an awful lot of math at it.
This is only a case by case solution.
Attachments
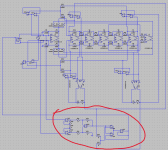
Can you explain U28/16 & their complements? It looks like you're driving the source device outputs into ground. Unless the feedback loops there cause the impedances to be different. Also, won't the error correction you're implementing at the bottom counteract the filter?
Sure! I made small duplets to compare the speakers to the filter, and then the filter to the source voltage. Looking at it now you may be right and I'll have to fiddle around with it, but that's the idea.Can you explain U28/16 & their complements?
Thats why I was saying I was dumb and put it in the wrong spot. I wanted that to go to the output as an error signal for the output section. Hence why I was asking if that would be the correct implementation of feedforward... which it's not... because I'm a dummy lolAlso, won't the error correction you're implementing at the bottom counteract the filter?
- Home
- Design & Build
- Electronic Design
- Feedforward Loops