I have been designing some subwoofer motors in FEMM and recently figured out how to use David Meeker's tutorials for blocked impedance and shorting rings in Mathematica and Matlab. I have a pretty good design close to where I want it and the BL²/re in the FEMM model is where I want it too.
But I'm stumped on how that would translate into a real world number assembled as a unit with the soft parts. Say I end up with a BL²/re in FEMM of 100, but I build that motor into a 15" with say a 350g mmd. Will that result in a lower BL²/re than the model? If so, is there any way to correlate/quantify mmd or sd for its affect on BL²/re? Should I overshoot the BL²/re in the FEMM model to get the real world number I want?
But I'm stumped on how that would translate into a real world number assembled as a unit with the soft parts. Say I end up with a BL²/re in FEMM of 100, but I build that motor into a 15" with say a 350g mmd. Will that result in a lower BL²/re than the model? If so, is there any way to correlate/quantify mmd or sd for its affect on BL²/re? Should I overshoot the BL²/re in the FEMM model to get the real world number I want?
Can we see some FEMM pictures of your sims? Very interested in FEMM sims, which currently are above my weight.
Why would the BL2/re be affected by mms? Driver efficiency will be affected, but the motor as such not i.m.o.
I’m still trying to figure out why a lot seem to focus on BL^2/Re as a transient performance parameter but not including MMS. I must admit it confuses me 🤔
Would you be so kind as to explain:
a) what a "transient performance parameter" is?
b) why BL2/Re would be a "transient performance parameter"?
a) what a "transient performance parameter" is?
b) why BL2/Re would be a "transient performance parameter"?
I am thinking around the ability to have that immediacy and impact. So when a 'short, sharp' note or sound is required, something that starts and stops quickly the driver has the ability to respond and not 'absorb' or in some way smear this Energy
My words are clearly not technically correct, but its to do with how some drivers that measure the same or well enough but seem to have less immediacy. Not a steady state frequency but. a transient ?
I had understood that the force and ability to 'accelerate' and respond was related to the amplifier control on the cone and this was related to BL^2/Re ?
My words are clearly not technically correct, but its to do with how some drivers that measure the same or well enough but seem to have less immediacy. Not a steady state frequency but. a transient ?
I had understood that the force and ability to 'accelerate' and respond was related to the amplifier control on the cone and this was related to BL^2/Re ?
This is what I feared: the fast-slow reasoning. There is mo such thing as a slow woofer. Immediacy etc. is related to the ability to reproduce higher frequencies (above LF) and has little to do with developing enough force to move the ( say 75 grams) cone assembly linearily over -say- 10 mm pk-pk at 35 Hz.
Filter those two woofers of yours to the same passband, and all differences are gone, apart from efficiency differences
Filter those two woofers of yours to the same passband, and all differences are gone, apart from efficiency differences
My experience which was unexpected and actually before any talk about psychoacoustics or any other rationale. I have one 18" and three 12" drivers, about to add another 18", just awaiting the amplifier to arrive.
I use the 18" from single figure Hz to 40 Hz or so, rolling off at 41 with a 48 db/Octave shelf filter, my 12" drivers roll on at around 20Hz and roll off at 70Hz or so. I also use the fronts and other channels to augment the lower frequencies where they are capable
When I do the obvious thing of lifting up the workload of my 18" sub to relieve the workload of the 12" subs below 30Hz where I can see notable distortion at high SPL's, particularly in the low 20's from the 12" subs. I can get a better smoother response and match the SPL, so measurement wise, better, less distortion, slightly more even response BUT, it loses impact on Both music and film when it measured better. Its not the distortion I like by the way as I believe I can hear this with a slight 'fluffiness' at low 20's from the 12" subs, listening and measuring
So there is something about more cone area and or potentially a more expedient response. Yes I have aligned correctly and do this all manually. I was expecting the sound to be better after the hours off work to reduce the distortion
In my head I have a thought about weight and the ability to stop and start, there must be something else in the mix, group delay you can measure and see, alignment and the results you can see and measure. But this doesn't necessarily correlate to the apparent responsiveness of the system.
A lot of the car audio style drivers seem to measure very well, with enough power but seem to have less slam ?
By the way no change with the frequencies above 40/50 Hz, as the mains are untouched by any changes
I use the 18" from single figure Hz to 40 Hz or so, rolling off at 41 with a 48 db/Octave shelf filter, my 12" drivers roll on at around 20Hz and roll off at 70Hz or so. I also use the fronts and other channels to augment the lower frequencies where they are capable
When I do the obvious thing of lifting up the workload of my 18" sub to relieve the workload of the 12" subs below 30Hz where I can see notable distortion at high SPL's, particularly in the low 20's from the 12" subs. I can get a better smoother response and match the SPL, so measurement wise, better, less distortion, slightly more even response BUT, it loses impact on Both music and film when it measured better. Its not the distortion I like by the way as I believe I can hear this with a slight 'fluffiness' at low 20's from the 12" subs, listening and measuring
So there is something about more cone area and or potentially a more expedient response. Yes I have aligned correctly and do this all manually. I was expecting the sound to be better after the hours off work to reduce the distortion
In my head I have a thought about weight and the ability to stop and start, there must be something else in the mix, group delay you can measure and see, alignment and the results you can see and measure. But this doesn't necessarily correlate to the apparent responsiveness of the system.
A lot of the car audio style drivers seem to measure very well, with enough power but seem to have less slam ?
By the way no change with the frequencies above 40/50 Hz, as the mains are untouched by any changes
The moment you introduce an additional crossover at 30Hz you add in a significant group delay, quite probably even peaking around just below the XO. This makes for the slower and fluffy bass impression you get. The only way to avoid that is a proper linear phase crossover (only doable in digital at these frequencies) so that 18" and 12"'s act as one single driver with no additional phase distortion other than from the natural roll-off of the 18". Ideally, and for the same reason, you'd also want to cross over from the 12" to the rest of system with a linear phase XO as well, notably when the XO point is around 300Hz or so. That creates fast bass and fundamental range without time smear.When I do the obvious thing of lifting up the workload of my 18" sub to relieve the workload of the 12" subs below 30Hz where I can see notable distortion at high SPL's, particularly in the low 20's from the 12" subs. I can get a better smoother response and match the SPL, so measurement wise, better, less distortion, slightly more even response BUT, it loses impact on Both music and film when it measured better. Its not the distortion I like by the way as I believe I can hear this with a slight 'fluffiness' at low 20's from the 12" subs, listening and measuring
------:------
As for OP's question, I see no mechanism how (BL)²/Re could be any affected by non-motor parameters.
------:------
And as for bass "driver sound" in general, higher (BL)²/Re with no other changes to parameters allows for more intrinsic feedback in the driver (when driver from a regular voltage source) and this helps (until overdriven) to reduce distortion and other errors (nonlinear/unstable friction in surrounds, etc) and increases power efficiency but you might need more voltage headroom from the amp and more EQ'ing when Qts becomes very low.
I personally favor mutiple large woofers with bascially microscopic excursions to any single small but ultra long-throw woofer just trying hard to "punch holes in the air". The increase in perceived impact and texture is tremendous when even dialed in the have the same frequency response (thus, roughly the same air volume displacment). The summit of this idea being a large bass horn (not that feasible, though).

The moment you introduce an additional crossover at 30Hz you add in a significant group delay, quite probably even peaking around just below the XO. This makes for the slower and fluffy bass impression you get. The only way to avoid that is a proper linear phase crossover (only doable in digital at these frequencies) so that 18" and 12"'s act as one single driver with no additional phase distortion other than from the natural roll-off of the 18". Ideally, and for the same reason, you'd also want to cross over from the 12" to the rest of system with a linear phase XO as well, notably when the XO point is around 300Hz or so. That creates fast bass and fundamental range without time smear.
------:------
As for OP's question, I see no mechanism how (BL)²/Re could be any affected by non-motor parameters.
------:------
And as for bass "driver sound" in general, higher (BL)²/Re with no other changes to parameters allows for more intrinsic feedback in the driver (when driver from a regular voltage source) and this helps (until overdriven) to reduce distortion and other errors (nonlinear/unstable friction in surrounds, etc) and increases power efficiency but you might need more voltage headroom from the amp and more EQ'ing when Qts becomes very low.
I personally favor mutiple large woofers with bascially microsopic excursions to any single small but ultra long-throw woofer just trying to "punch holes in the air". The increase in perceived impact and texture is tremendous even dialed in the have the same frequency response (thus, roughly the same air volume displacment). The summit of this idea being a large bass horn (not that feasible, though).
Tks, the last point is where I think I am at, all the crossovers, delays and PEQ's are done digitally BTW
Sorry to detract form the BL^2/Re question
Mms needs to be considered in order to relate the motor's force (the BL^2/Re term) to acceleration.I’m still trying to figure out why a lot seem to focus on BL^2/Re as a transient performance parameter but not including MMS. I must admit it confuses me 🤔
Some discussion of that math in this thread:
https://www.diyaudio.com/community/threads/driver-for-dual-12-sealed.378584/post-6842322
Mms needs to be considered in order to relate the motor's force (the BL^2/Re term) to acceleration.
Some discussion of that math in this thread:
https://www.diyaudio.com/community/threads/driver-for-dual-12-sealed.378584/post-6842322
Intereting when I apply this maths I dont get the figures shown BL/(Re^0.5 * Mms). When I look at most results I get less than 1 not the 30,40 they show. But as a comparator then simply looking at BL^2/Re/Mms has the same proportionality, so potentially useful as a comparator
I apologize for this thread, it didn't get any replies for a few days after posting so I forgot about it!
I am designing a sub to use in small sealed airspace with a qtc of under 1, so motor force is a top variable that I need to focus on. It is underhung and fully shorted with le(x) within 80% down to 30hz so I'm not worried about transients. What I am looking for is some way to correlate how motor force with no weight load will change with the weight from mmd. There is no weight component to the FEMM simulation, so I know the motor force number I get there is not going to be the same after I build the sub and pull the parameters. What I am fearing is mmd having more of an effect on the motor force than I realize. The sub will need to have a bl²/re of over 100 to do what I want. Right now, my simulation shows a bl²/re of 127 and my mmd will be 285g with 128in² surface area.
I couldn't find any definitive information online so I decided to just go ahead and machine the motor and see where it ends up. Maybe add different levels of mass when pulling the parameters to see if I can figure out any correlation on my own with multiple data points.
I am designing a sub to use in small sealed airspace with a qtc of under 1, so motor force is a top variable that I need to focus on. It is underhung and fully shorted with le(x) within 80% down to 30hz so I'm not worried about transients. What I am looking for is some way to correlate how motor force with no weight load will change with the weight from mmd. There is no weight component to the FEMM simulation, so I know the motor force number I get there is not going to be the same after I build the sub and pull the parameters. What I am fearing is mmd having more of an effect on the motor force than I realize. The sub will need to have a bl²/re of over 100 to do what I want. Right now, my simulation shows a bl²/re of 127 and my mmd will be 285g with 128in² surface area.
I couldn't find any definitive information online so I decided to just go ahead and machine the motor and see where it ends up. Maybe add different levels of mass when pulling the parameters to see if I can figure out any correlation on my own with multiple data points.
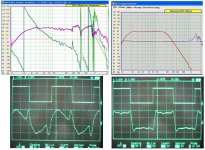
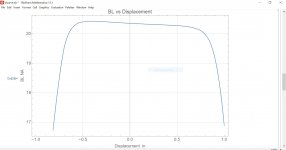
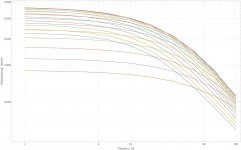
Sure, here are some revisions from early on in the development. The design has changed since, so these are not a representative of the final design. Also, a lot of the simulation for bl curves and inductance curves are done with Mathematica scripts.Can we see some FEMM pictures of your sims? Very interested in FEMM sims, which currently are above my weight.
Attachments
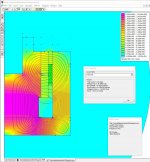
Thanx a lot. In your sub1 picture, which part of the motor displayed here is magnet and which is pole-piece (iron parts) assembly?
I have some trouble recognizing and distinghuising one and the other: it looks as if it is one piece. Lower left I see a blue line, but that is all.
I have some trouble recognizing and distinghuising one and the other: it looks as if it is one piece. Lower left I see a blue line, but that is all.
Bumping this up.
I'm doing a simulation on my final revision which includes a pole sleeve of .040" thick aluminum.
When I run the simulations, the motor force comes out the same both with the aluminum and with the aluminum deleted (specified as air) using the same steel dimensions.
Does anyone know for sure if the loss of motor force that usually comes with adding a pole sleeve is influenced by the aluminum blocking it or if it's just from the increase in the gap width?
I'm doing a simulation on my final revision which includes a pole sleeve of .040" thick aluminum.
When I run the simulations, the motor force comes out the same both with the aluminum and with the aluminum deleted (specified as air) using the same steel dimensions.
Does anyone know for sure if the loss of motor force that usually comes with adding a pole sleeve is influenced by the aluminum blocking it or if it's just from the increase in the gap width?
I opened a new thread with a somewhat comparable question:
https://www.diyaudio.com/community/...per-sleeves-on-loudspeaker-polepieces.394151/
Maybe both threads could be merged.
https://www.diyaudio.com/community/...per-sleeves-on-loudspeaker-polepieces.394151/
Maybe both threads could be merged.
- Home
- Loudspeakers
- Subwoofers
- Translating BL²/Re from FEMM model to real life