Lately I have been considering building speakers with controlled directionality, specifically to reduce floor and ceiling reflection energy, without narrowing the horizontal dispersion (so my wife and kids can enjoy music with me at the same time).
Here are a few of my thoughts on this, that I'd like to get opinions on. Since some of my reasoning is at odds with what I see people building, perhaps I am misunderstanding something.
1) I only need a vertical main lobe that's consistent over +/- 5 degrees. I'm not going to listen to my speakers more than 5 degrees off axis vertically.
2) The first floor and ceiling reflections are going to be the loudest (vertical) reflections, and the 20-30 degree vertical response (plus and minus) is what's going to drive the levels of these reflections.
3) Between 5 and 20 degrees off the vertical axis, the energy is mostly going to the back wall, or the floor/ceiling behind me. It's not a critical area because that energy is going to bounce around and travel a great distance before it reaches my ears so it will be attenuated.
4) Similarly, angles greater than 30 degrees don't matter as much as those in the 20-30 degree range, because those will have to bounce multiple times before they get to my ears. (Standing waves could of course be an issue, though.)
I know a lot of people will insist that the way to address dispersion is with waveguides, but there are some major problems with waveguides that I don't like. For instance, most waveguides available are too wide vertically to drastically reduce floor and ceiling reflections: they would need to have a vertical response limited to less than 40 degrees (at least in my listening room with my seating position). Also, waveguides for low frequencies get large, making it difficult to create multi-way speakers without very large center to center spacing, which creates lobing issues. Of course, there's distortion concerns as well. Personally I have yet to hear a horn or waveguide speaker that doesn't offend my ears, though I admittedly haven't heard too many. I can't DIY arbitrary shapes for waveguides, and I can't find pre-fabricated ones that will do what I want them to do. For all these reasons, I find it very unlikely that I'll use a waveguide to address this issue.
Instead, I plan to address it using multiple drivers by applying beamforming techniques. Specifically, the idealized version of what I would like to do amounts to a null-steering beamformer. That's easy using lots of drivers with separate amps and phase controls for each one, but much more difficult to manage passively, which is what I would like to do. I think the Snell eXpanding arrays managed this over a limited frequency range (using waveguides for the higher frequencies), but the null was steered +/- 90 instead of +/- 20 to +/- 30 the way I would like, and probably only existed at lower frequencies (200 - 500 hz range) if you made far-field assumptions that aren't relevant in most listening rooms. I think they only claimed to reduce reflections by a few dB, though that was still a significant improvement. I'd like to do more, however.
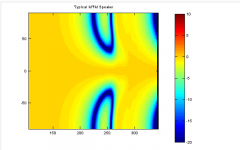
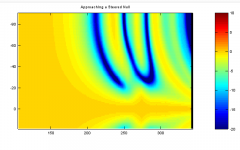
I'm including a few pictures to show what I'm concerned with and the progress I have made so far. It's been noted that a typical MTM speaker has a symmetric vertical lobe, and limited off-axis energy near the crossover frequency. At low frequencies, the mids are close together relative to the wavelength they produce, so the sound is mostly omnidrectional. As frequency increases, the mids begin to lobe until the mainlobe is rather narrow. At frequencies above the crossover, the tweeter radiates in every direction again. At some point, the tweeter's size becomes large relative to the wavelength it's generating, and beaming occurs again. I have included a sonogram that shows this effect. The image portrays a normalized 20hz to 20Khz response, but you'll have to ignore the x axis labels. (My apologies, as I haven't figured out how to make Octave write what I want on them, and I don't have Matlab at home.)
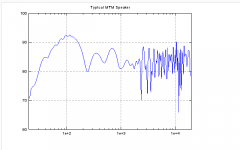
I have also included a frequency response that shows the effect of floor and ceiling reflections for a typical MTM. This shows large power swings in the 200 - 1000 hz range, followed by an area that is consistent between 1000 hz and 2000 hz were beaming occurs. Above 2 Khz, the tweeter is omnidirectional, and significant reflections interfere with the direct radiated sound, creating more power swings.
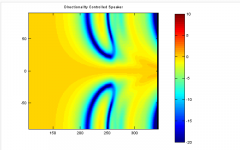
For comparison, I have included equivalent graphs applying directionality control using multiple drivers. The sonogram shows a consistent, symmetrical vertical main lobe from 750 hz to 6,000 hz. The response between -5 and +5 degrees is very consistent across the entire audible range. The response at 20-30 degrees off axis is greatly reduced across a wide bandwidth, even above the 2Khz range where the MTM vertical dispersion suddenly grows significantly.
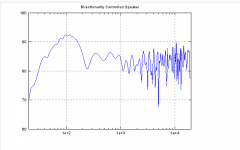
Viewing the frequency response of the multi-driver directionality controlled variant, we see much more consistency in the 300 - 1000 hz range than with the MTM speaker. In the 1000 - 2000 hz both versions are consistent, but the controlled version shows less variability in the 2K - 4Khz range. As frequency increases, there's probably a point at which my simulations are exaggerating floor reflections, because carpet would attenuate them.
Does anyone know of a project that has addressed this issue in a DIY friendly way? How about a commercial way? I'd like to create a more consistent null in the 20-30 degree range. I have been able to extend the null lower than I've shown here, but doing so created variations at mid-range frequencies when taking into account near-field phase and amplitude variations.
I could apply what I've done and build a speaker, but I don't have time to build and rebuild as I learn / improve, so I want to do it right the first time.
Thoughts?
Here are a few of my thoughts on this, that I'd like to get opinions on. Since some of my reasoning is at odds with what I see people building, perhaps I am misunderstanding something.
1) I only need a vertical main lobe that's consistent over +/- 5 degrees. I'm not going to listen to my speakers more than 5 degrees off axis vertically.
2) The first floor and ceiling reflections are going to be the loudest (vertical) reflections, and the 20-30 degree vertical response (plus and minus) is what's going to drive the levels of these reflections.
3) Between 5 and 20 degrees off the vertical axis, the energy is mostly going to the back wall, or the floor/ceiling behind me. It's not a critical area because that energy is going to bounce around and travel a great distance before it reaches my ears so it will be attenuated.
4) Similarly, angles greater than 30 degrees don't matter as much as those in the 20-30 degree range, because those will have to bounce multiple times before they get to my ears. (Standing waves could of course be an issue, though.)
I know a lot of people will insist that the way to address dispersion is with waveguides, but there are some major problems with waveguides that I don't like. For instance, most waveguides available are too wide vertically to drastically reduce floor and ceiling reflections: they would need to have a vertical response limited to less than 40 degrees (at least in my listening room with my seating position). Also, waveguides for low frequencies get large, making it difficult to create multi-way speakers without very large center to center spacing, which creates lobing issues. Of course, there's distortion concerns as well. Personally I have yet to hear a horn or waveguide speaker that doesn't offend my ears, though I admittedly haven't heard too many. I can't DIY arbitrary shapes for waveguides, and I can't find pre-fabricated ones that will do what I want them to do. For all these reasons, I find it very unlikely that I'll use a waveguide to address this issue.
Instead, I plan to address it using multiple drivers by applying beamforming techniques. Specifically, the idealized version of what I would like to do amounts to a null-steering beamformer. That's easy using lots of drivers with separate amps and phase controls for each one, but much more difficult to manage passively, which is what I would like to do. I think the Snell eXpanding arrays managed this over a limited frequency range (using waveguides for the higher frequencies), but the null was steered +/- 90 instead of +/- 20 to +/- 30 the way I would like, and probably only existed at lower frequencies (200 - 500 hz range) if you made far-field assumptions that aren't relevant in most listening rooms. I think they only claimed to reduce reflections by a few dB, though that was still a significant improvement. I'd like to do more, however.
I'm including a few pictures to show what I'm concerned with and the progress I have made so far. It's been noted that a typical MTM speaker has a symmetric vertical lobe, and limited off-axis energy near the crossover frequency. At low frequencies, the mids are close together relative to the wavelength they produce, so the sound is mostly omnidrectional. As frequency increases, the mids begin to lobe until the mainlobe is rather narrow. At frequencies above the crossover, the tweeter radiates in every direction again. At some point, the tweeter's size becomes large relative to the wavelength it's generating, and beaming occurs again. I have included a sonogram that shows this effect. The image portrays a normalized 20hz to 20Khz response, but you'll have to ignore the x axis labels. (My apologies, as I haven't figured out how to make Octave write what I want on them, and I don't have Matlab at home.)
I have also included a frequency response that shows the effect of floor and ceiling reflections for a typical MTM. This shows large power swings in the 200 - 1000 hz range, followed by an area that is consistent between 1000 hz and 2000 hz were beaming occurs. Above 2 Khz, the tweeter is omnidirectional, and significant reflections interfere with the direct radiated sound, creating more power swings.
For comparison, I have included equivalent graphs applying directionality control using multiple drivers. The sonogram shows a consistent, symmetrical vertical main lobe from 750 hz to 6,000 hz. The response between -5 and +5 degrees is very consistent across the entire audible range. The response at 20-30 degrees off axis is greatly reduced across a wide bandwidth, even above the 2Khz range where the MTM vertical dispersion suddenly grows significantly.
Viewing the frequency response of the multi-driver directionality controlled variant, we see much more consistency in the 300 - 1000 hz range than with the MTM speaker. In the 1000 - 2000 hz both versions are consistent, but the controlled version shows less variability in the 2K - 4Khz range. As frequency increases, there's probably a point at which my simulations are exaggerating floor reflections, because carpet would attenuate them.
Does anyone know of a project that has addressed this issue in a DIY friendly way? How about a commercial way? I'd like to create a more consistent null in the 20-30 degree range. I have been able to extend the null lower than I've shown here, but doing so created variations at mid-range frequencies when taking into account near-field phase and amplitude variations.
I could apply what I've done and build a speaker, but I don't have time to build and rebuild as I learn / improve, so I want to do it right the first time.
Thoughts?
Attachments
A 90 degree waveguide in the corners covers across the back and side walls thereby illuminating the whole room horizontally. A waveguide doesn't have a sound of its own so to speak when built and used correctly. Also back wall reflections aren't necessarily good ones if I had to choose, I'd rather tolerate the side walls.
Below a certain frequency the reflections become less critical. You seem to be focussing on 300Hz and below, is that right?
Maybe you could also look at a vertical line array, maybe a Keele CBT.
Below a certain frequency the reflections become less critical. You seem to be focussing on 300Hz and below, is that right?
Maybe you could also look at a vertical line array, maybe a Keele CBT.
Last edited:
A 90 degree waveguide in the corners covers across the back and side walls thereby illuminating the whole room horizontally. A waveguide doesn't have a sound of its own so to speak when built and used correctly. Also back wall reflections aren't necessarily good ones if I had to choose, I'd rather tolerate the side walls.
Below a certain frequency the reflections become less critical. You seem to be focussing on 300Hz and below, is that right?
Maybe you could also look at a vertical line array, maybe a Keele CBT.
I'm concentrating more on floor and ceiling reflections partly because they are difficult to treat. You can at least hope to treat your walls if you care to.
I have also considered that we don't have good vertical discrimination because of how our ears are placed on our heads, but we have much better horizontal discrimination. It follows that our ears/brains can distinguish better between wall reflections than with floor and ceiling reflections. I'd be interested in what the research has to say.
I don't have any delusions of being able to create significant directionality below 300 hz. I would like nice directionality from 300 hz to 20Khz.
bbutterfield
What have simulations been done?
If you're asking what program I used to do the simulations, they are all done in Octave, which is basically a freeware version of Matlab. I use Matlab for work, but I don't have a license at home. It's a very powerful scripting language, that allows me to simulate just about whatever I want, If I take the time to do it. I don't particularly like using other people's software, because I too often find that I can't easily modify it to do something new.
I would rate the ceiling as one of the worst if not the worst early reflection, the floor and back wall are problems too. But I wouldn't say they are all that hard to treat. I do believe that focussing too hard on this might lead you to make compromises that make things worse if not careful.
A good philosophy I believe is that if you are going to make (or to permit) any compromise it should be further from the sound source where possible, which means changing the speaker itself needs care. It can be better to ignore an issue (several ms away) and then treat it individually.
I've built an elliptical waveguide (large with directivity below 1000Hz in each direction), and I found it wasn't worth the effort (there were complications). I don't have the issue using a good round waveguide and a little ceiling treatment, and importantly I couldn't notice an increase in the ceiling reflection level.
The most obvious part of the ceiling reflection is probably the part above 1000Hz, and in my case the midrange is down on the floor.
At the least you can do a lot with a little fibreglass wrapped in some material around a simple frame and suspended from the ceiling. A diffuser can be incorporated for little extra effort. For the ultimate I would cut a hole in the ceiling and insert the device, but only for looks.
A good philosophy I believe is that if you are going to make (or to permit) any compromise it should be further from the sound source where possible, which means changing the speaker itself needs care. It can be better to ignore an issue (several ms away) and then treat it individually.
I've built an elliptical waveguide (large with directivity below 1000Hz in each direction), and I found it wasn't worth the effort (there were complications). I don't have the issue using a good round waveguide and a little ceiling treatment, and importantly I couldn't notice an increase in the ceiling reflection level.
The most obvious part of the ceiling reflection is probably the part above 1000Hz, and in my case the midrange is down on the floor.
At the least you can do a lot with a little fibreglass wrapped in some material around a simple frame and suspended from the ceiling. A diffuser can be incorporated for little extra effort. For the ultimate I would cut a hole in the ceiling and insert the device, but only for looks.
Last edited:
Thanks for posting this. I hadn't read it before, and I think it gets to the heart of my concerns on this issue.
In section 3, Geddes addresses "The Idea of an Ideal Polar Map", which is a major issue I'd like to address in this thread. He specifically states the importance of reducing Very Early Reflections (VERs), which he says is intuitively accomplished by narrowing directivity.
However, in most listening environments with the speakers placed a couple of feet from the front wall, the floor reflection is the first echo to arrive at the listening position after the direct sound, and this happens at a shallower angle than the ceiling echo, which typically follows afterward. So in this case, if we want to eliminate the earliest reflection, we need a very narrow directionality, but we need less directionality to eliminate echoes arriving later. When considering Time Difference of Arrival (TDOA), I don't think Geddes' intuition holds all the time, and can even be shown to be somewhat backwards, when interpreted as I have. There may be scenarios in which reality follows his intuition, but the earliest VERs don't appear to.
It certainly is strange to me that very early reflections are a major concern in his paper, but the earliest reflection typically comes from the floor, and happens at an angle of only 30 degrees or so. Looking at figure 9, 30 degree acoustic radiation is only attenuated 3 dB or so. That's hardly a drastic reduction, so what makes that radiation pattern more ideal than one that actually reduces the first VERs significantly?
Would it be preferred to compromise some radiated energy at angles above 45 degrees in exchange for a reduction in energy in the 20-40 degree range? It seems logical to me.
I also wonder with horns/waveguiedes if there is some limiting factor that prevents narrowing vertical dispersion beyond the 40 degree mark, which seems to be the narrowest I've seen. Does distortion increase beyond that, or have designers made the choice not to limit it more than that even for home audio use (not worrying about crowds of people like in a venue).
Regarding the Keele CBTs, those have typically been created with a wide dispersion characteristic, which is again at odds with what I think I want.
Something I would love to see is a real-life comparison of time (impulse) and frequency measurements taken in an actual listening room with directivity-controlling speakers, and traditional speakers.
Thanks for the inputs so far!
Last edited:
Such a difficult field. I admire your work so far. Where did you get started with this? I frankly don't know much at all and wouldn't know where to start. I'm personally puzzled at this. My directionality questions come from at times just because of my own performance experiences with brass, some string instruments. While brass can be highly directional, strings especially mid and bass vibrate the whole of the space depending on your dimensions.
Thanks for any direction you may share.
To that... what sort of space will the system be working in? Do you have dimensions?
Thanks for any direction you may share.
To that... what sort of space will the system be working in? Do you have dimensions?
The thing with making the vertical on a wg really narrow is it then needs to become much wider to maintain vertical control down to the xo. For example, I built some 90x60 elliptical waveguides meant to cross around 1khz. Had I kept the width around 14", the vertical would only be about 8" in diameter and it would begin to have wider directivity above the xo. To maintain vertical directivity down to the xo I increased the height to about 13", which makes the width almost 19" across. If I went to a 40° vertical it would become a good bit wider.
Fwiw I don't think Geddes puts near as much importance on vertical directivity, though he does advocate treating these spots if possible.
Fwiw I don't think Geddes puts near as much importance on vertical directivity, though he does advocate treating these spots if possible.
Once you start increasing the height of the waveguide to control vertical directivity lower, you also increase the center to center distance between mid-woofer and waveguide that ultimately gives you vertical nulls where you don't want them. The best way around that problem would be with a Synergy. A corner line array also holds promise but line arrays can also have lobing issues
I suppose an argument could be made that the relative density of rays causing reflections at steep angles could make up for the long paths with multiple bounces that they take to get to the listener. For instance, perhaps you have a Floor, Ceiling, Floor, Listener, (FCFL) path and FCFCL path within just a few degrees of each other, so attenuating those angles reduces more reflections, even if those reflections arrive with significantly reduced power.
The thing with making the vertical on a wg really narrow is it then needs to become much wider to maintain vertical control down to the xo. For example, I built some 90x60 elliptical waveguides meant to cross around 1khz. Had I kept the width around 14", the vertical would only be about 8" in diameter and it would begin to have wider directivity above the xo. To maintain vertical directivity down to the xo I increased the height to about 13", which makes the width almost 19" across. If I went to a 40° vertical it would become a good bit wider.
Fwiw I don't think Geddes puts near as much importance on vertical directivity, though he does advocate treating these spots if possible.
That's a good point about the size escalating, particularly the width. I do hope to make something a bit more visually appealing, with a decent WAF.
I think I'll be able to significantly increase the frequency of the null I've been extending. Still have to wonder if it's what I really want, though. Options are always nice at any rate.
It is very hard to remove the vertical reflections and they are the loudest and most likely to color the sound. Also, waveguides are rarely useful below 1 kHz. Of course they exist, but they become big, and will most likely require significant EQ. I've personally come to the conclusion that floor to ceiling line arrays are the only way to deal with the problem effectively.
...
Something I would love to see is a real-life comparison of time (impulse) and frequency measurements taken in an actual listening room with directivity-controlling speakers, and traditional speakers.
Thanks for the inputs so far!
+1 to Earl's work...
Here is an example of a 3 way speaker using constant directivity 90 x 40 waveguide for midrange (500 Hz to 5kHz) and 90 x 50 for 5 kHz and up. The woofer is a 15" in an old school Klipsch Cornwall (sealed) cab.
I took 6 measurements across a 6' x 2' grid at the listening position (where my couch would be) for my right speaker:
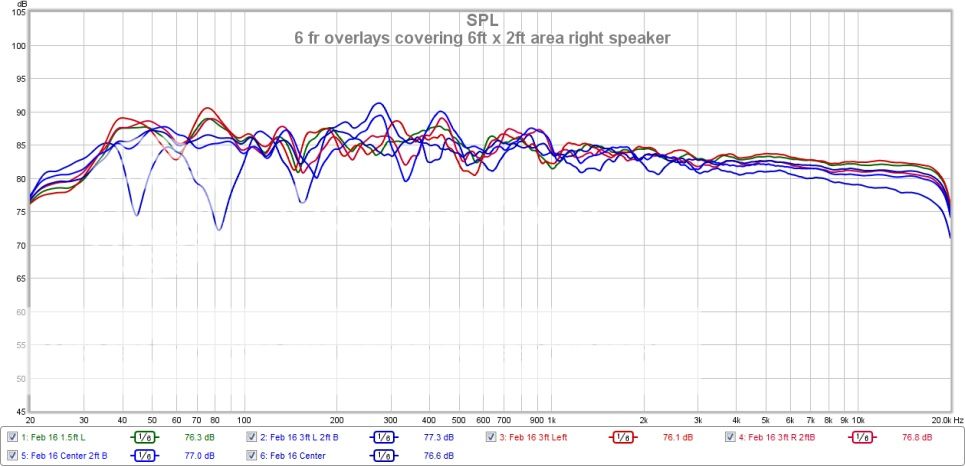
Reasonably smooth response across the listening area. I attribute this to the constant directivity waveguides. I can sit anywhere on the couch without losing any tonal quality.
Unfortunately, I did not take multiple fr spot measurements of the same speaker that originally had a exponential HF horn. When I listened to it, it drove me crazy that I could move my head 6 inches and literally the cymbals almost disappeared due to the narrow directivity - almost laser like at 10 kHz and then a huge null 6 inches to either side. Not so with the constant directivity devices, which is what I replaced the exponential horn with. I did that after reading Earl's paper.
While I have the impulse responses as well, the step response is the preferred way to look at a speakers timing, but that's another thread.
Hope that helps.
..I know a lot of people will insist that the way to address dispersion is with waveguides..
..Thoughts?
Yeah, used Klipschorn.
")
Better yet, upper mid to treble: Synergy Horn, mid-bass: Klipschorn.
Honestly, you'd be better served by reading Sean Olive's blog:
Audio Musings by Sean Olive
..and of course Toole's book: "Sound Reproduction: The Acoustics and Psychoacoustics of Loudspeakers and Rooms"
+1 to Earl's work...
Here is an example of a 3 way speaker using constant directivity 90 x 40 waveguide for midrange (500 Hz to 5kHz) and 90 x 50 for 5 kHz and up.
While I have the impulse responses as well, the step response is the preferred way to look at a speakers timing, but that's another thread.
Hope that helps.
Thanks. That's very informative. It would be great to have a comparison in the same environment, too.
After thinking about it for a second, I agree with the step response being better than the impulse response for the speaker timing. No need for another thread as far as I'm concerned.
I've done a bit of work on the lower treble region. I'm trying to extend the nulls between 20 and 40 degrees to cover as much bandwidth as possible. I think this is a significant improvement from yesterday. The plots are symmetric, so I'm not going to bother showing both halves. For reference, 200 = 322 hz, 250 = 1367 hz, 300 = 5792 hz.
Attachments
Last edited:
I also wonder with horns/waveguiedes if there is some limiting factor that prevents narrowing vertical dispersion beyond the 40 degree mark, which seems to be the narrowest I've seen. Does distortion increase beyond that, or have designers made the choice not to limit it more than that even for home audio use (not worrying about crowds of people like in a venue).
HF drivers in line array PAs are very much more limited vertically than 40º to reduce overlap.
Beyma does some typical one with claimed 90º horizontal and 5º vertical.
http://www.beyma.com/products/wavesguidecompressiondrivers/1WL4FE8
Not sure I would want to use them at home.
Last edited:
- Status
- This old topic is closed. If you want to reopen this topic, contact a moderator using the "Report Post" button.
- Home
- Loudspeakers
- Multi-Way
- Preferred / Ideal Directionality