Ouch!
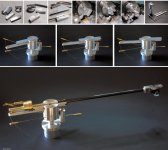
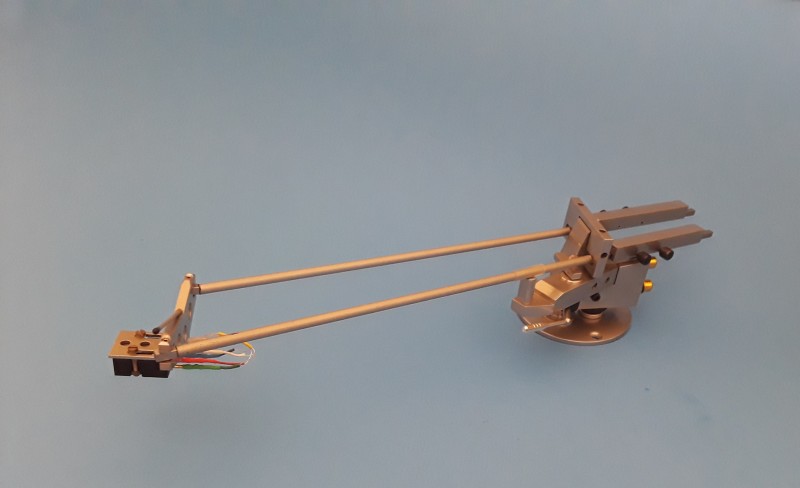
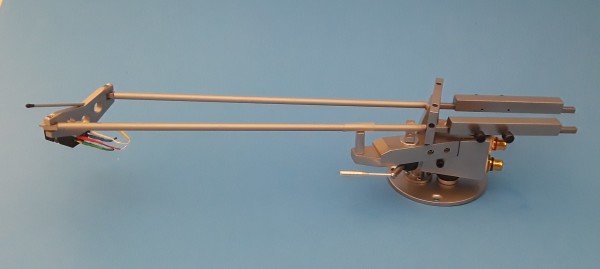
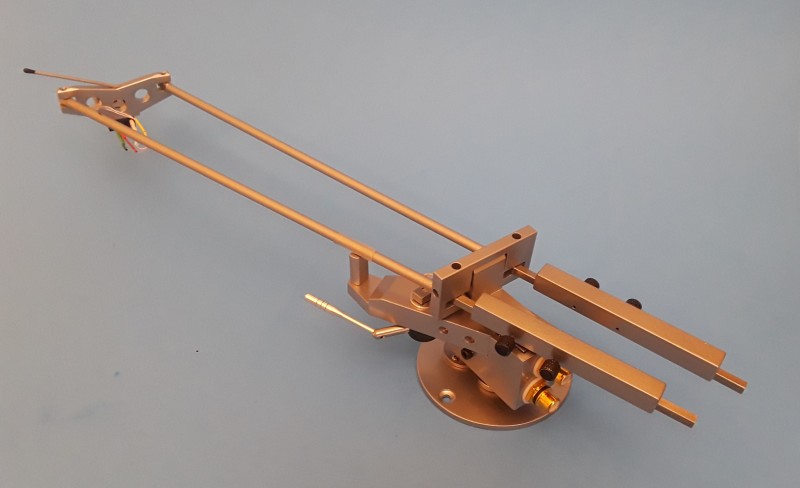
The Syrinx tonearm is practically finished. Interesting to build, but completely useless: sadly it is not able to trace a disc, it remains exactly where is put, not rotating, nor advancing.
I do not think it's a problem of frictions (I've done everything possible to avoid it: the driving mechanism alone rotates by simply tilting - the linear bearing, without the arm, moves with just a breath).
I think i've made a big design mistake, not understanding that the same torque that generates the rotation is exactly the same that, acting orthogonally, hinders the linear bearing to slide (like moving a carriage by pushing from side). It's a matter of vectors, point of applications of the forces, not friction
I've made this three rough tests
A - Syrinx used as expected - results as I said: I have increased the play in the linear bearing (under load, this reduces the friction) - increased the VTF too up to 2.5 gr: no change
B - Driving mechanism disengaged the by removing the string: in this way the arm becomes similar to the hypothesis (arm advancing pulled by the stylus drag) on which are working Direct driver and 2wice: the arm rotates normally but does not advance a millimeter. This is strange, because everyone is worried about how to stop the arm drag: but did somebody make some real tests? Probably the stylus drag is only a very small fraction of the side force, which can move radial bearings (maybe - Doug mentioned problems of friction with mutiple pivots) but not a linear ballbearing. Now I fear that any kind of guiding mechanism based on stylus drag could be troublesome.
C - driving mechanism functional, but not linked to the linear bearing: results practically identical to the B test. The arm rotates fine, but as above does not advance. The mechanism rotates the pulleys with irrelevant friction, proving that this is not the problem.
Conclusions: It was fun to build the Syrinx - unfortunately the tracking forces are so modest that it was necessary to build it, and build it well, to see what was going on.
Despite obvious disappointment it was an amazing challenge and a good way to touch the problems we are dealing for. I hope too that this experiment may be useful for those who are working on these kind of arms.
I personally will make some more accurate tests and measures trying to better understand the forces that are generated during tracking, which seem to behave really far from many statements around
ciao carlo
fortunately the other two arms are ok, but this is off topic..
The Syrinx tonearm is practically finished. Interesting to build, but completely useless: sadly it is not able to trace a disc, it remains exactly where is put, not rotating, nor advancing.
I do not think it's a problem of frictions (I've done everything possible to avoid it: the driving mechanism alone rotates by simply tilting - the linear bearing, without the arm, moves with just a breath).
I think i've made a big design mistake, not understanding that the same torque that generates the rotation is exactly the same that, acting orthogonally, hinders the linear bearing to slide (like moving a carriage by pushing from side). It's a matter of vectors, point of applications of the forces, not friction
I've made this three rough tests
A - Syrinx used as expected - results as I said: I have increased the play in the linear bearing (under load, this reduces the friction) - increased the VTF too up to 2.5 gr: no change
B - Driving mechanism disengaged the by removing the string: in this way the arm becomes similar to the hypothesis (arm advancing pulled by the stylus drag) on which are working Direct driver and 2wice: the arm rotates normally but does not advance a millimeter. This is strange, because everyone is worried about how to stop the arm drag: but did somebody make some real tests? Probably the stylus drag is only a very small fraction of the side force, which can move radial bearings (maybe - Doug mentioned problems of friction with mutiple pivots) but not a linear ballbearing. Now I fear that any kind of guiding mechanism based on stylus drag could be troublesome.
C - driving mechanism functional, but not linked to the linear bearing: results practically identical to the B test. The arm rotates fine, but as above does not advance. The mechanism rotates the pulleys with irrelevant friction, proving that this is not the problem.
Conclusions: It was fun to build the Syrinx - unfortunately the tracking forces are so modest that it was necessary to build it, and build it well, to see what was going on.
Despite obvious disappointment it was an amazing challenge and a good way to touch the problems we are dealing for. I hope too that this experiment may be useful for those who are working on these kind of arms.
I personally will make some more accurate tests and measures trying to better understand the forces that are generated during tracking, which seem to behave really far from many statements around
ciao carlo
fortunately the other two arms are ok, but this is off topic..
Attachments
Last edited:
I've always thought that stylus drag force influence is overly exaggerated. Let's say, a myth about said force able to slowdown platter speed due to different record groove modulations. With modern carts WTF of 1-3 gram IMO it is not a case... Anyway, beautiful work, I'm very impressed. Your experience is very helpful and I'm sure it will encourage decent DIY-ers. As for me, I will finish my own linear pivot project, that is different from anything I've seen. Hope it will work.
Now I fear that any kind of guiding mechanism based on stylus drag could be troublesome.
The moving pivot tonearm of Frank Schroeder does function.
I simply can not accept that Carlo's beautiful tonearm is a failure. According to Carlo's description, the culprit is the linear ball bearing. Although the forces in play are very small, I suspect that the bearing is binding because the binding ratio was not taken into consideration.
Last edited:
I really think the problem with the arm incapable of advancing forward on a linear bearing is that the whole arm assembly is just too heavy including the counterweight that simply trumps the stylus drag force, especially after you disabled the guiding mechanism. I still believe the Dynavector style of shorter vertical arm will operate better. I also think the guiding mechanism may require a more 'active' role, similar to multi-linkage arms like the Thales, instead of the 'passive' string approach I previously thought. It will be up to future experimenters to find out.
Thank you for your work and report, Carlo.
Thank you for your work and report, Carlo.
Skating force is proportional to drag force, so no matter how low the drag force, it is just as big an issue. And yes it is a significant proportion, so definitely not a phantom.When the stylus drag force is so small, what does this say about the skating force? Does antiskating chase a phantom?
Hi all, and thank you for your attention and appreciation.
The disappointment for the Syrinx is big, but I was somehow prepared. As I said, after 100 years and 1500 types of arms sold, it's hard to find something new, what seems a new road often is simply an useless path abandoned from others.
Promising mock ups and focusing on friction and skating problems prevented me from understanding that the side force torque not only works well on the driving mechanism as needed but, pushing sideways, also blocks the linear bearing. It is like pressing the accelerator and the brake simultaneously.
After these words of wisdom (sob!) let's try to use this failure: last night I did some measurements - do not trust too much on them, it's not a rocket science as you can see - just useful for comparison with previous realizations.
Data given not in newton but in grams to be immediately understood even by me
Rotation (measurements taken by turning the headshell or the end of the rear driving mechanism)
test A - complete Syrinx (NO rotation NO sliding): headshell 1.1 - rear 2.8
test B - horizontal pivot bearings + linear (rotation OK - NO sliding): headshell 0.03 - rear 0.1gr
test C - hor. bearings + guiding functional but unlinked (rotation OK - NO sliding): headshell 0.46 gr - rear 1.1 gr
Sliding
linear bearing - unlinked: unloaded: 0.15 (static) > 0.1 (dynamic) - loaded (shaft + CW): 0.6 > 0.25
Some thoughts
The problems noted by Dd (weight, inertia) and Alighiszem (binding) are relevant and could be improved (spring counterweight, longer linear bearing) but do not seem to be the real problem, which is similar to that of linear trackers, but increased by a lever twice as long. The situation is more complex too, and I'm not able to make the breakdown of the forces (help needed).
The value of the stylus drag (0,4> 1) is known even to me (examined in some posts during design process) stylus drag - Vinyl Engine (stylus drag calculated with stopping method). What I have not found anywhere is the side force value, that from this experience seems to be higly prevalent (used to move the string gadget works perfectly, when there is no linear bearing blocking - test C)
The stylus drag would pull the linear bearing in the right way (along the axis) but seems practically ineffective (test B) with this dynamic friction of just 0,25. Maybe the stylus drag is even more variable and less than calculated.
From that my doubts about the practical implementation of passive guiding mechanisms (troublesomeI i said, not impossible). But on this we have to ask Doug who worked on it, and Hiten who is building something. Or we have to wait for the 2wice work, with his magnetic levitation bearing: but on Syrinx experience I would not place it in axis with the horizontal pivot.
Sorry for the too long post - Carlo
The disappointment for the Syrinx is big, but I was somehow prepared. As I said, after 100 years and 1500 types of arms sold, it's hard to find something new, what seems a new road often is simply an useless path abandoned from others.
Promising mock ups and focusing on friction and skating problems prevented me from understanding that the side force torque not only works well on the driving mechanism as needed but, pushing sideways, also blocks the linear bearing. It is like pressing the accelerator and the brake simultaneously.
After these words of wisdom (sob!) let's try to use this failure: last night I did some measurements - do not trust too much on them, it's not a rocket science as you can see - just useful for comparison with previous realizations.
Data given not in newton but in grams to be immediately understood even by me
Rotation (measurements taken by turning the headshell or the end of the rear driving mechanism)
test A - complete Syrinx (NO rotation NO sliding): headshell 1.1 - rear 2.8
test B - horizontal pivot bearings + linear (rotation OK - NO sliding): headshell 0.03 - rear 0.1gr
test C - hor. bearings + guiding functional but unlinked (rotation OK - NO sliding): headshell 0.46 gr - rear 1.1 gr
Sliding
linear bearing - unlinked: unloaded: 0.15 (static) > 0.1 (dynamic) - loaded (shaft + CW): 0.6 > 0.25
Some thoughts
The problems noted by Dd (weight, inertia) and Alighiszem (binding) are relevant and could be improved (spring counterweight, longer linear bearing) but do not seem to be the real problem, which is similar to that of linear trackers, but increased by a lever twice as long. The situation is more complex too, and I'm not able to make the breakdown of the forces (help needed).
The value of the stylus drag (0,4> 1) is known even to me (examined in some posts during design process) stylus drag - Vinyl Engine (stylus drag calculated with stopping method). What I have not found anywhere is the side force value, that from this experience seems to be higly prevalent (used to move the string gadget works perfectly, when there is no linear bearing blocking - test C)
The stylus drag would pull the linear bearing in the right way (along the axis) but seems practically ineffective (test B) with this dynamic friction of just 0,25. Maybe the stylus drag is even more variable and less than calculated.
From that my doubts about the practical implementation of passive guiding mechanisms (troublesomeI i said, not impossible). But on this we have to ask Doug who worked on it, and Hiten who is building something. Or we have to wait for the 2wice work, with his magnetic levitation bearing: but on Syrinx experience I would not place it in axis with the horizontal pivot.
Sorry for the too long post - Carlo
Attachments

Not too long at all, Carlo. You and your fellow makers are keeping procrastinators like me in the audience. Your craftsmanship is brilliant.
My two cents is that the side force from the outside groove wall is what can be counted on to move the arm inward, as it is a spiral worm gear (I'm a carpenter who used to drive Peugeot 403s) with a very large gearing advantage over the tone arm. So a dash of skating might be tolerated. The drag friction is so variable that I would not know what to do with it. Like sewing fabric: too floppy for a woodworker.
I have been mulling an irregular tetragon pivoted arm for years, but my offering would be so rough it might need another thread.
My two cents is that the side force from the outside groove wall is what can be counted on to move the arm inward, as it is a spiral worm gear (I'm a carpenter who used to drive Peugeot 403s) with a very large gearing advantage over the tone arm. So a dash of skating might be tolerated. The drag friction is so variable that I would not know what to do with it. Like sewing fabric: too floppy for a woodworker.
I have been mulling an irregular tetragon pivoted arm for years, but my offering would be so rough it might need another thread.
Carlo your workmanship is excellent. I hope you will find some way like strung weight or springs to make this beautiful arm working.
* mechanical ground and lowest friction possible.
Regards
I was thinking more in the line of unipivot tonearm* and and least friction main bearing with some contraption help (String and weight) to push the arm forward. (Combined with antiskate)and Hiten who is building something.
* mechanical ground and lowest friction possible.
Regards
Last edited:
Hi all,
since the thread seems into hibernation, I will use a little space for problems that concern only us diyers, or at most who is interested to know if the theoretical matters so deeply analized can materialize in an arm really working. Hoping to be not too off-topic.
I will not repeat what I wrote in recent Syrinx posts. If Test A was frustrating, test B seemed frankly surprising, so I've made new experiments with a solution similar to that drawn on Dd hypothesis in post #1283, moving forward the linear bearing position and trying to minimize the linear bearing friction. I've made a bearing with some (well, too much) play but extremely sliding (type X1).If the syrinx was moving with just a puff this one should be accurately leveled because it moves with just an inclination of 2 ° -3 °.
B test: Success - this arm moves with the stylus drag (with VTF> 2gr).
However it's completely unpredicatable - sometimes starts and another not - and not self-regulating (as they say of some Birch style): it comes immediately to the end of the balls rail and stays there. Everything seems enough to stop it (eg a drop of the lightest oil on bearing). Of course a bearing like this is totally useless for sounding, so I've tried a self-centered (type X2). and one on radial bearings (Y type), but they did not move at all. I also believe that any driving mechanism ** would inhibit the advancing.
I hope someone will repeat the experiment with greater skill and luck than me, because this poses serious doubts about the realization of such arms. So now I confess my wonder in seeing videos with arms moving in spite of dozens of bearings, cams and relevant masses, claimed to sound beautifully.
carlo
** Obviously I tried the "string gadget" on this new arm too, and obviously did not move, even if the friction and position of the linear bearing are better than in the previous one.
At this point i'm curious to try a Birch (help needed Doug...)
since the thread seems into hibernation, I will use a little space for problems that concern only us diyers, or at most who is interested to know if the theoretical matters so deeply analized can materialize in an arm really working. Hoping to be not too off-topic.
I will not repeat what I wrote in recent Syrinx posts. If Test A was frustrating, test B seemed frankly surprising, so I've made new experiments with a solution similar to that drawn on Dd hypothesis in post #1283, moving forward the linear bearing position and trying to minimize the linear bearing friction. I've made a bearing with some (well, too much) play but extremely sliding (type X1).If the syrinx was moving with just a puff this one should be accurately leveled because it moves with just an inclination of 2 ° -3 °.
B test: Success - this arm moves with the stylus drag (with VTF> 2gr).
However it's completely unpredicatable - sometimes starts and another not - and not self-regulating (as they say of some Birch style): it comes immediately to the end of the balls rail and stays there. Everything seems enough to stop it (eg a drop of the lightest oil on bearing). Of course a bearing like this is totally useless for sounding, so I've tried a self-centered (type X2). and one on radial bearings (Y type), but they did not move at all. I also believe that any driving mechanism ** would inhibit the advancing.
I hope someone will repeat the experiment with greater skill and luck than me, because this poses serious doubts about the realization of such arms. So now I confess my wonder in seeing videos with arms moving in spite of dozens of bearings, cams and relevant masses, claimed to sound beautifully.
carlo
** Obviously I tried the "string gadget" on this new arm too, and obviously did not move, even if the friction and position of the linear bearing are better than in the previous one.
At this point i'm curious to try a Birch (help needed Doug...)
Attachments


Last edited:
nocdplease:
Are you sure the drag force that moves your arm forward (elongates) will become zero when the arm gets exactly tangent? Because then no further elongation will be needed, that means the drag force should be zero or it should be balanced by a counter-force. But since there is always a certain stylus drag force, it should be counter-balanced. What is providing that counter-balancing force? Or perhaps I don't quite understand what makes the arm elongated when it is off-tangent, and what keeps it in balance (neither shrinking nor elongating) when it is exactly tangent. Could you draw a vector diagram in off-tangent and then in tangent position, showing the forces? In off-tangent position the force component in the arm length direction should not be balanced (so there will be longitudal move of the stylus from the pivot), while in tangent position all forces should have a balancing counter-force, so that no movement in longitudal direction or radial force (skating force) should occur.
Are you sure the drag force that moves your arm forward (elongates) will become zero when the arm gets exactly tangent? Because then no further elongation will be needed, that means the drag force should be zero or it should be balanced by a counter-force. But since there is always a certain stylus drag force, it should be counter-balanced. What is providing that counter-balancing force? Or perhaps I don't quite understand what makes the arm elongated when it is off-tangent, and what keeps it in balance (neither shrinking nor elongating) when it is exactly tangent. Could you draw a vector diagram in off-tangent and then in tangent position, showing the forces? In off-tangent position the force component in the arm length direction should not be balanced (so there will be longitudal move of the stylus from the pivot), while in tangent position all forces should have a balancing counter-force, so that no movement in longitudal direction or radial force (skating force) should occur.




Sorry Icsaszar, do not understand your reasoning. The purpose of my experiment was to see if the stylus drag was able to advance a tonearm with a linear bearing. This arm was built from some ideas of Direct driver and others (tricycle and following variants) to explore that search pattern.
I have pointed out my observations, never said that the stylus drag becomes zero on the tangency **: seems that there is always: when, and if, the cart starts comes immediately to the end of the rail (40 mm) without reaching any point of balance between axial and radial forces that could stop it. What coud happen going any further I do not know: the goal of the test was not to destroy cartridges, even the old ones.
What I have observed - for the second time - is that the drag does not seem to be strong enough to move reliably a really working arm. If it was, clear that it would need a control mechanism, but first I wanted to see if there was something to brake, because if the arm does not advance, it does not need anything: it's simply perfect for garbage.
However I've tried both my string gadget and the simple string tied to the middle point: no control, both block completely any movement.
Walter - magnetic guide: how?
carlo
** my opinion (maybe wrong) is exactly the opposite, but i do not have the competences to have theories: that's why i make experiments, to verify my (and other's) opinions
I have pointed out my observations, never said that the stylus drag becomes zero on the tangency **: seems that there is always: when, and if, the cart starts comes immediately to the end of the rail (40 mm) without reaching any point of balance between axial and radial forces that could stop it. What coud happen going any further I do not know: the goal of the test was not to destroy cartridges, even the old ones.
What I have observed - for the second time - is that the drag does not seem to be strong enough to move reliably a really working arm. If it was, clear that it would need a control mechanism, but first I wanted to see if there was something to brake, because if the arm does not advance, it does not need anything: it's simply perfect for garbage.
However I've tried both my string gadget and the simple string tied to the middle point: no control, both block completely any movement.
Walter - magnetic guide: how?
carlo
** my opinion (maybe wrong) is exactly the opposite, but i do not have the competences to have theories: that's why i make experiments, to verify my (and other's) opinions
Of course the stylus drag never becomes zero. The residual force (stylus drag force minus counter balancing force) should become zero at tangency. If you can find a model that fulfills this criteria, you are a winnerSorry Icsaszar, do not understand your reasoning. ... never said that the stylus drag becomes zero on the tangency

Icsaszar, I would be happy to make an arm that can decently follow the thales geometry, but am losing hope.
Clear that the stylus drag is never zero, but from my tests it very weak, ranged between 100 and 200mg with VTF 2 grams. On web betwen 400 and 1000, maybe measured with normal arms with offset 23 ° ca. Zero offset may reduce it?
Question: with the syrinx I thought it was the side force + lever arm to block the linear bearing, but with this new with the bearing near the stylus?
I wonder: on the point of tangency (with 0 offset arms) the VTF should be divided equally on the two sides of the groove, so no side force = any rotation (and even no advancement because the string gadget generates elongation from rotation.) Where am I wrong?
carlo
Clear that the stylus drag is never zero, but from my tests it very weak, ranged between 100 and 200mg with VTF 2 grams. On web betwen 400 and 1000, maybe measured with normal arms with offset 23 ° ca. Zero offset may reduce it?
Question: with the syrinx I thought it was the side force + lever arm to block the linear bearing, but with this new with the bearing near the stylus?
I wonder: on the point of tangency (with 0 offset arms) the VTF should be divided equally on the two sides of the groove, so no side force = any rotation (and even no advancement because the string gadget generates elongation from rotation.) Where am I wrong?
carlo
Last edited:
Magnet guide
Carlo, If you put a magnet on the end of rear shaft, and use curved iron guide of the same shape as blue semicircle AB located 1-2 mm beneath magnet , it should make arm advance working properly. As a result, final arm will be kind of mix between Shroeder LT and Syrinx.
It seems to me that main problem with string guide is friction in the wheel-string system. With magnet guide it is not the case. Real question is inside force and skating - anti-skating issues...
Carlo, If you put a magnet on the end of rear shaft, and use curved iron guide of the same shape as blue semicircle AB located 1-2 mm beneath magnet , it should make arm advance working properly. As a result, final arm will be kind of mix between Shroeder LT and Syrinx.
It seems to me that main problem with string guide is friction in the wheel-string system. With magnet guide it is not the case. Real question is inside force and skating - anti-skating issues...
Attachments
Last edited:
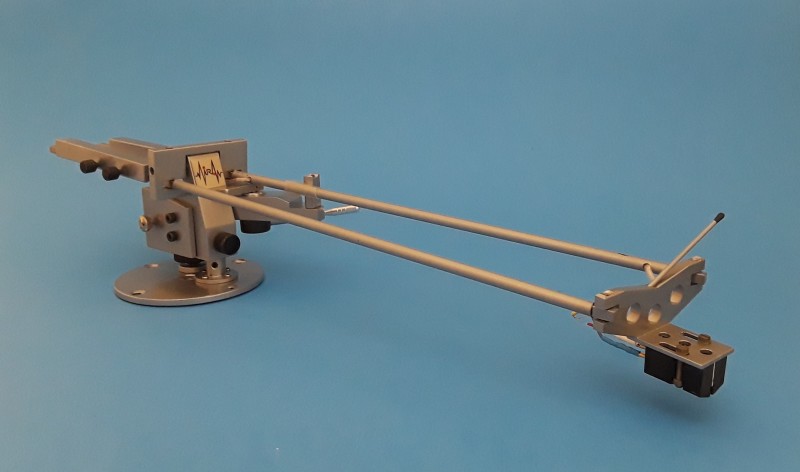
ViRa tonearm
Thanks Jim for alerting us to this new product. The ViRa tonearm seems to have a new model that's more refined. The two rods are on the same plane now which makes it closer to the Van Eps. I think it looks better. It's also conceptually similar to Thales Easy and JR Impossible tonearms. It doesn't appear to have anti-skating mechanism, which is probably deemed not necessary by the designer. I think one advantage of this type of arm is that the headshell pivots are not directly above the cartridge. And those headshell pivot bearings must be the highest quality to not disturb the sensitive pick up stylus.
I'm glad we have another new commercial product option for non-parallel style tangential tracking.

Thanks Jim for alerting us to this new product. The ViRa tonearm seems to have a new model that's more refined. The two rods are on the same plane now which makes it closer to the Van Eps. I think it looks better. It's also conceptually similar to Thales Easy and JR Impossible tonearms. It doesn't appear to have anti-skating mechanism, which is probably deemed not necessary by the designer. I think one advantage of this type of arm is that the headshell pivots are not directly above the cartridge. And those headshell pivot bearings must be the highest quality to not disturb the sensitive pick up stylus.
I'm glad we have another new commercial product option for non-parallel style tangential tracking.
- Home
- Source & Line
- Analogue Source
- Angling for 90° - tangential pivot tonearms