Any off axis measurements yet? Interesting topology.....
No not yet. They are rather time consuming to do - when my current projects let off a bit I will do it.
Vertical off axis to check freq dependent XO lobing? Or horizontal polars? I suspect that with such a low XO freq (500Hz) it won't be a problem at all. The polars will just follow the 10F/8424 which will probably resemble the TC9FD which I have measured elsewhere.
Last edited:
Ahh....I overlooked the 500hz part. Tough to get good data unless you have a really big room. I'd be interested in both h & v and to see if the phase holds up in the horizontal.No not yet. They are rather time consuming to do - when my current projects let off a bit I will do it.
Vertical off axis to check freq dependent XO lobing? Or horizontal polars? I suspect that with such a low XO freq (500Hz) it won't be a problem at all. The polars will just follow the 10F/8424 which will probably resemble the TC9FD which I have measured elsewhere.
It is not about the topology
I think implementation is more important than topology. IF for example, one topology works best with XO at 500Hz and the other at 600Hz, then those are what you have to compare. It cannot be apple to apple.
LR2 has been considered by many to be the sweet spot of crossover topology. Many good designers have been fascinated by this topology. I have never designed one that suited me, nor I have been satisfied with others' design that suited others. Because my ears are very sensitive to distortion and fatigue.
In the driver test round 3 I have stated my finding that the new crossover brought less fatigue level. And that was comparing to memory! This time I'm comparing side by side and it is obvious that LR2 is too fatiguing for me when compared to the new XO. In the first track (Clapton) my ears detect higher sound level for LR2 (objectively or subjectively I don't know), which worsen the fatiguing aspect of LR2 on that track.
LR2 can work only when both drivers are smooth. It seems RS225 is not smooth enough with basic LR2 for my taste. From the FR chart, we can see that being shallower than the new XO, the RS225 contributes to the fatigue, not only around XO frequency I believe, but may affect higher to the top frequency (at least 8k is audible).
FATIGUE, is the major variable where LR2 losses to the Harsch. The second variable is TRANSIENT ATTACK. Drum is (almost) impossible to reproduce by speaker accurately enough. And without this transient impact it is hard to say that a reproduced drum sound is natural.
All other variables such as DETAIL/DYNAMIC RANGE and GENERAL TONAL ACCURACY, I think LR2 wins in this comparison. And it is more about implementation than topology.
So which one is the better one imo? It is hard to say. But my ears is the king. If he thinks that LR2 is fatiguing then he may command to find another topology, or replace the woofer! If I had to choose, I think I'm forced to choose the Harsch
But, I have built many speakers, and none of both topology is in my current/latest builds, and that should tell something. But I have used Harsch in the past, but never an LR2 (longest is 2 days listening). I mean, everyone should always try LR2 until they get the one that they can accept. If I have smoother woofer, I will for sure try again.
I think implementation is more important than topology. IF for example, one topology works best with XO at 500Hz and the other at 600Hz, then those are what you have to compare. It cannot be apple to apple.
LR2 has been considered by many to be the sweet spot of crossover topology. Many good designers have been fascinated by this topology. I have never designed one that suited me, nor I have been satisfied with others' design that suited others. Because my ears are very sensitive to distortion and fatigue.
In the driver test round 3 I have stated my finding that the new crossover brought less fatigue level. And that was comparing to memory! This time I'm comparing side by side and it is obvious that LR2 is too fatiguing for me when compared to the new XO. In the first track (Clapton) my ears detect higher sound level for LR2 (objectively or subjectively I don't know), which worsen the fatiguing aspect of LR2 on that track.
LR2 can work only when both drivers are smooth. It seems RS225 is not smooth enough with basic LR2 for my taste. From the FR chart, we can see that being shallower than the new XO, the RS225 contributes to the fatigue, not only around XO frequency I believe, but may affect higher to the top frequency (at least 8k is audible).
FATIGUE, is the major variable where LR2 losses to the Harsch. The second variable is TRANSIENT ATTACK. Drum is (almost) impossible to reproduce by speaker accurately enough. And without this transient impact it is hard to say that a reproduced drum sound is natural.
All other variables such as DETAIL/DYNAMIC RANGE and GENERAL TONAL ACCURACY, I think LR2 wins in this comparison. And it is more about implementation than topology.
So which one is the better one imo? It is hard to say. But my ears is the king. If he thinks that LR2 is fatiguing then he may command to find another topology, or replace the woofer! If I had to choose, I think I'm forced to choose the Harsch
But, I have built many speakers, and none of both topology is in my current/latest builds, and that should tell something. But I have used Harsch in the past, but never an LR2 (longest is 2 days listening). I mean, everyone should always try LR2 until they get the one that they can accept. If I have smoother woofer, I will for sure try again.
So, Jay "the Ear", which sound clip was LR2 and which was Harsch XO? It's interesting that you haven't found a second order LR that you can live with.
I am rediscovering a lot of old blues records that sound exceptionally good with the Harsch XO. They were mediocre before but come alive now. It has to do with how they were recorded and mastered. I have a John Lee Hooker record that I am listening to now - there is a live recorded track (Tupelo) where you can hear that it is a small club and there is the sound of cars driving by outside the club. The guitar, drums, and the visceral feel of his voice is quite amazing.
I am rediscovering a lot of old blues records that sound exceptionally good with the Harsch XO. They were mediocre before but come alive now. It has to do with how they were recorded and mastered. I have a John Lee Hooker record that I am listening to now - there is a live recorded track (Tupelo) where you can hear that it is a small club and there is the sound of cars driving by outside the club. The guitar, drums, and the visceral feel of his voice is quite amazing.
Last edited:
So, Jay "the Ear", which sound clip was LR2 and which was Harsch XO?
B was LR2.
It's interesting that you haven't found a second order LR that you can live with.
I think some of us had very earlier recommend replacing the RS225 with suitable woofer for the purpose. Some had even suggested the ScanSpeak
I think the cheaper Satori (SBAcoustics) has been acceptable for Jeff Bagby or Joachim Gerhard (in LR2).And remember, even if the roll-off response of the woofer is very smooth (and thus introduce less fatigue), it's midrange quality will NOT be on par with top quality midrange. So what it adds should be more important than what it takes from the midrange. And this could only mean expensive woofer (Imagine, what woofer that can produce midrange as good as 10F at 5x or 10x the price???).
I am rediscovering a lot of old blues records that sound exceptionally good with the Harsch XO. They were mediocre before but come alive now.
Yes, it is more musical to me too.
It has to do with how they were recorded and mastered.
I'm not sure about that. I think naturalness has something to do with more than one variables. It requires the transient of a crossover like the Harsch, but I think the LR2 in this example has more correctness regarding tonality.
How hard is it to lower the XO frequency for the Harsch crossover? Assumming that the midrange has acceptable non-linear distortion at lower frequency, I believe it will improve the quality of the Harsch crossover in your speaker.
ADD: I believe both topologies will benefit from lower XO point IF 10F midrange is used. In other thread I have seen TC9 has a non-linear distortion peak just below 300Hz, but I believe 10F is better than TC9 in this aspect.
Last edited:
10F versus B80
Curious how the 10F will compare, I compared the Eric Clapton track from this thread (which I assumed is 10F) with the tracks from my favorite top 2 or 3 of the round 3 driver test...
There's just no way the B80 can compete with the 10F The 10F is more detailed and lively. Listening to the Clapton with 10F, the feeling was so obvious that I'm listening to a live recording. Even my favorite from round 3 was not the B80...
Curious how the 10F will compare, I compared the Eric Clapton track from this thread (which I assumed is 10F) with the tracks from my favorite top 2 or 3 of the round 3 driver test...
There's just no way the B80 can compete with the 10F
The 10F is more detailed and lively. Listening to the Clapton with 10F, the feeling was so obvious that I'm listening to a live recording. Even my favorite from round 3 was not the B80... Curious how the 10F will compare, I compared the Eric Clapton track from this thread (which I assumed is 10F) with the tracks from my favorite top 2 or 3 of the round 3 driver test...
There's just no way the B80 can compete with the 10F
I never released the answer key reveal yet so how would you know for sure which is the B80? Oh, I forgot, you aren't called "the Ear" for nothing.
Hi X, if you aren't yet sure that the Harsch crossover traded off tonality for transient, then look at it like this...
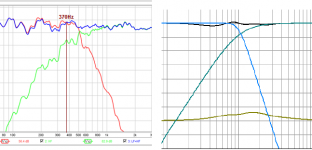
From previous driver tests we have come to a conclusion that the main variable that contribute to tonality is the flatness of the frequency response. Now look at the ideal/theoretical response of the Harsch crossover, where there are "wiggles" above and (especially) below the crossover frequency.
There is phase "rotation/shift" around 370Hz. This is audible. Perfect total response is where both drivers contribute positively over certain wide bandwidth. It means, when the woofer pushes, the tweeter should also pushes. Visually, the summed response should be above both woofer response and tweeter response. In your LR2 we can see a perfect example where there are huge/wide overlap of such condition. This contributes to audible DETAIL / DYNAMIC RANGE.
To make the trade-off more reasonable for Harsch XO, the trick is then to move this "wiggles" to area where it is less audible. I would say to move this 370Hz point to no more than 300Hz (based on my own listening experience). Better if you can put it down to absolute 200Hz. This frequency number is based on study regarding human ears sensitivity to localization and what contribute to tonality.
From previous driver tests we have come to a conclusion that the main variable that contribute to tonality is the flatness of the frequency response. Now look at the ideal/theoretical response of the Harsch crossover, where there are "wiggles" above and (especially) below the crossover frequency.
There is phase "rotation/shift" around 370Hz. This is audible. Perfect total response is where both drivers contribute positively over certain wide bandwidth. It means, when the woofer pushes, the tweeter should also pushes. Visually, the summed response should be above both woofer response and tweeter response. In your LR2 we can see a perfect example where there are huge/wide overlap of such condition. This contributes to audible DETAIL / DYNAMIC RANGE.
To make the trade-off more reasonable for Harsch XO, the trick is then to move this "wiggles" to area where it is less audible. I would say to move this 370Hz point to no more than 300Hz (based on my own listening experience). Better if you can put it down to absolute 200Hz. This frequency number is based on study regarding human ears sensitivity to localization and what contribute to tonality.
Attachments
Hi X, thanks again for posting clips. I preferred the sound of the AX-O crossover. For me it sounded smoother, less forward (had slightly less midrange) and more natural (ie better attack and decay). Listened with AKG Q701 headphones and current DIY desktop speakers comprised of Tangband W3/SLOB dual 8"s (W3 crossed around 250Hz).
Hi X, thanks again for posting clips. I preferred the sound of the AX-O crossover. For me it sounded smoother, less forward (had slightly less midrange) and more natural (ie better attack and decay). Listened with AKG Q701 headphones and current DIY desktop speakers comprised of Tangband W3/SLOB dual 8"s (W3 crossed around 250Hz).
Mrk7,
Thanks for your feedback. So far we have a small majority who say that they prefer XO A for its naturalness and better transient attack. Jay prefers tonality of B but in the end would choose A. Byrtt also chose A.
Well no point in holding it back anymore. XO A is indeed revealed if you read Byrtt's comments in his attached txt file.
Hi X, if you aren't yet sure that the Harsch crossover traded off tonality for transient, then look at it like this...
From previous driver tests we have come to a conclusion that the main variable that contribute to tonality is the flatness of the frequency response. Now look at the ideal/theoretical response of the Harsch crossover, where there are "wiggles" above and (especially) below the crossover frequency.
There is phase "rotation/shift" around 370Hz. This is audible. Perfect total response is where both drivers contribute positively over certain wide bandwidth. It means, when the woofer pushes, the tweeter should also pushes. Visually, the summed response should be above both woofer response and tweeter response. In your LR2 we can see a perfect example where there are huge/wide overlap of such condition. This contributes to audible DETAIL / DYNAMIC RANGE.
To make the trade-off more reasonable for Harsch XO, the trick is then to move this "wiggles" to area where it is less audible. I would say to move this 370Hz point to no more than 300Hz (based on my own listening experience). Better if you can put it down to absolute 200Hz. This frequency number is based on study regarding human ears sensitivity to localization and what contribute to tonality.
Thanks a well written post and good points Jay, although have a little add see below.
Mrk7,
Thanks for your feedback. So far we have a small majority who say that they prefer XO A for its naturalness and better transient attack. Jay prefers tonality of B but in the end would choose A. Byrtt also chose A.
Well no point in holding it back anymore. XO A is indeed revealed if you read Byrtt's comments in his attached txt file.
I'm not shure but could suspect Jay talk naturalness and tonality because he little technical biased knowing of the small compromise wrigles Harsch XO type develop. Will point out that those wrigles are relative low Q with relative soft phase change curve, meaning less real world audioable resonance or non audioable for most. Think wrigles seen for drivers as CHN70 or A7 paper have much higher Q and SPL change leading to much more real world audioable resonance and critic in my experience, than those relative soft small errors Harsch XO type develope.
I'm not shure but could suspect Jay talk naturalness and tonality because he little technical biased knowing of the small compromise wrigles Harsch XO type develop.
No, I was talking about the naturalness 100% from listening of the clips from XRK. Actually I'm quite surprised and feel disturbed with it's sound. It reminds me of series crossover and why I didn't like it.
And I feel strange that many of you didn't notice how it sounded so different. The transient, yes, it is positively wanted. But the tonality is unusual. Usually, if there is inaccuracy, the effect can be unacceptable in certain recording. And I feel it with the clip#6 recording (Mariah Carey), where my champion driver messed up with the sound.
Will point out that those wrigles are relative low Q with relative soft phase change curve, meaning less real world audioable resonance or non audioable for most.
I think the point is not the wrigles or the Q, but the phase change, or phase overlap between woofer and midrange/tweeter. I have paid attention to this (including the maximum frequency it is allowed to happen) as a criteria in crossover design since several years ago. It is some kind of "secret" for me (because I can relate it with the quality of my speakers).
Oh, BTW, I think X has mentioned how the Harsch didn't have phase (180deg) wrap. I'm not sure about this but I guess that phase wrap is okay as long as the response is linear. Harsch OTOH has that phase turn below XO point.
Tried this on my 3-way pa. Sounds pretty good.
Cool! Please tell us more about your system drivers and where you set your XO points. Any measurements?
Similar drivers (15" with inductor added next to coax) to the pic but configured a little differently at the moment. Crossover points 270 and 1.1k. Lots of reflections in the measurement. Will be playing with this more later.
For clarity, the subs run up to 270, 12" and 15" covering the mid range. The 15" rolls off at around 400. I tried to crossover at around 120 but it sounds better where it's at now.
Ciare NDCX12-1.4
Eminence Kappalite 3015
B&C 18PS76
For clarity, the subs run up to 270, 12" and 15" covering the mid range. The 15" rolls off at around 400. I tried to crossover at around 120 but it sounds better where it's at now.
Ciare NDCX12-1.4
Eminence Kappalite 3015
B&C 18PS76
Attachments

Will be getting a pair of well-behaved drivers with extended response soon: the SEAS DXT and the SEAS U18. The DXT has been proven robust enough to take first-order electrical like a champ to achieve LR2 target slopes in a few designs, primarily Goran's (of Audioexcite) Monitor DXT and Mark's ER18DXT. The Bessel on the tweeter probably would be peanuts in comparison.
Maybe I'll read up more on the Harsch and then attempt a passive implementation without an all-pass/ladder-delay network (which as X has commented, defeats the purpose of going QTP in the first place with the likely phase shift).
Thinking out loud, but the acoustic centre of the DXT is already set back in relation to the midwoofer compared to a flush-mounted dome and also allows a stepped baffle to get us the rest of the way there, so to speak, as diffraction along the edge of the stepped baffle is reduced by the waveguide loading.
Does anyone think this could be a viable idea? The controlled directivity of the DXT also helps to reduce off-axis blooming from dispersion mismatch that may occur along Fc for a 180-degree waveguide.
I do still think that the resultant circuit will be pretty complicated as the DXT needs to have its response shaped, but nonetheless not an impossible or ridiculous proposition.
Maybe I'll read up more on the Harsch and then attempt a passive implementation without an all-pass/ladder-delay network (which as X has commented, defeats the purpose of going QTP in the first place with the likely phase shift).
Thinking out loud, but the acoustic centre of the DXT is already set back in relation to the midwoofer compared to a flush-mounted dome and also allows a stepped baffle to get us the rest of the way there, so to speak, as diffraction along the edge of the stepped baffle is reduced by the waveguide loading.
Does anyone think this could be a viable idea? The controlled directivity of the DXT also helps to reduce off-axis blooming from dispersion mismatch that may occur along Fc for a 180-degree waveguide.
I do still think that the resultant circuit will be pretty complicated as the DXT needs to have its response shaped, but nonetheless not an impossible or ridiculous proposition.
Hi XRT921,
I recently finished construction of an MTM design using an old pair of Vifa M18WO-09-08 drivers together with a Vifa XT25TG30-04 mounted on a Pellegrene elliptical waveguide No 85125 in a Parts Express 1cf enclosure.
When I first started this project I had already decided to make this system active with a LR4 Xover implemented in a Minidsp since I’ve had significant success in the past with this device.
However, after having read about the S. Harsch Xover, I thought it might be interesting to try it out on my new MTM system, just to see what all the hype was about.
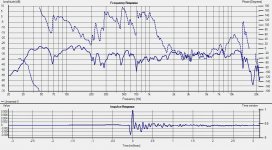
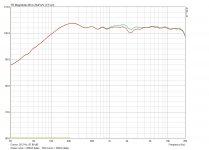
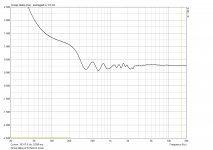
I started, as I normally do, by taking a 1m and nearfield response of the bass/mid-range driver and port together with a 1m response of the tweeter. I then constructed the target curves defined by S. Harsch and set about making the acoustic responses of the bass/mid-range driver and tweeter fit the target curves via the various biquads in the Minidsp.
The results are shown attached. The Xover frequency is set for 2KHz and I found that the flattest response was obtained with a tweeter delay of between 280uS and 300uS, which is reasonably close to the recommended 250uS for this Xover frequency. The measured step and group delay responses are also attached. I think the FR could be made flatter with 290uS, but the Minidsp can only increment 20uS steps (1/48KHz = 20.83uS)
One of my observations was that the measured acoustic slope of the tweeter without the Xover is (predictably) only 12dB/Oct., which is the same slope as the target. So if the tweeter response is made to approximate the same slope as the target, there can’t be any attenuation at low frequencies.
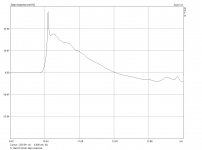
In my system as described above, the response of the tweeter’s Xover, ie the voltage response across the tweeters terminals, takes the shape of an inverse Linkwitz Transform with only 19dB-20dB attenuation at all frequencies lower than 800Hz. This worries me because with a 100 watt amplifier driving the tweeter Xover, the tweeter will potentially have to handle 1watt of signal power at all frequencies below 800Hz ie, 5.6 Vp-p signals.
I suspect that this could cause significant amounts of IM distortion, which may not be masked by the low frequency signal.
This issue together with the substantial amount of overshoot it creates on square wave signals really limits its appeal to me.
Peter
I recently finished construction of an MTM design using an old pair of Vifa M18WO-09-08 drivers together with a Vifa XT25TG30-04 mounted on a Pellegrene elliptical waveguide No 85125 in a Parts Express 1cf enclosure.
When I first started this project I had already decided to make this system active with a LR4 Xover implemented in a Minidsp since I’ve had significant success in the past with this device.
However, after having read about the S. Harsch Xover, I thought it might be interesting to try it out on my new MTM system, just to see what all the hype was about.
I started, as I normally do, by taking a 1m and nearfield response of the bass/mid-range driver and port together with a 1m response of the tweeter. I then constructed the target curves defined by S. Harsch and set about making the acoustic responses of the bass/mid-range driver and tweeter fit the target curves via the various biquads in the Minidsp.
The results are shown attached. The Xover frequency is set for 2KHz and I found that the flattest response was obtained with a tweeter delay of between 280uS and 300uS, which is reasonably close to the recommended 250uS for this Xover frequency. The measured step and group delay responses are also attached. I think the FR could be made flatter with 290uS, but the Minidsp can only increment 20uS steps (1/48KHz = 20.83uS)
One of my observations was that the measured acoustic slope of the tweeter without the Xover is (predictably) only 12dB/Oct., which is the same slope as the target. So if the tweeter response is made to approximate the same slope as the target, there can’t be any attenuation at low frequencies.
In my system as described above, the response of the tweeter’s Xover, ie the voltage response across the tweeters terminals, takes the shape of an inverse Linkwitz Transform with only 19dB-20dB attenuation at all frequencies lower than 800Hz. This worries me because with a 100 watt amplifier driving the tweeter Xover, the tweeter will potentially have to handle 1watt of signal power at all frequencies below 800Hz ie, 5.6 Vp-p signals.
I suspect that this could cause significant amounts of IM distortion, which may not be masked by the low frequency signal.
This issue together with the substantial amount of overshoot it creates on square wave signals really limits its appeal to me.
Peter
Attachments
Hi XRT921,
I recently finished construction of an MTM design using an old pair of Vifa M18WO-09-08 drivers together with a Vifa XT25TG30-04 mounted on a Pellegrene elliptical waveguide No 85125 in a Parts Express 1cf enclosure.
When I first started this project I had already decided to make this system active with a LR4 Xover implemented in a Minidsp since I’ve had significant success in the past with this device.
However, after having read about the S. Harsch Xover, I thought it might be interesting to try it out on my new MTM system, just to see what all the hype was about.
I started, as I normally do, by taking a 1m and nearfield response of the bass/mid-range driver and port together with a 1m response of the tweeter. I then constructed the target curves defined by S. Harsch and set about making the acoustic responses of the bass/mid-range driver and tweeter fit the target curves via the various biquads in the Minidsp.
The results are shown attached. The Xover frequency is set for 2KHz and I found that the flattest response was obtained with a tweeter delay of between 280uS and 300uS, which is reasonably close to the recommended 250uS for this Xover frequency. The measured step and group delay responses are also attached. I think the FR could be made flatter with 290uS, but the Minidsp can only increment 20uS steps (1/48KHz = 20.83uS)
One of my observations was that the measured acoustic slope of the tweeter without the Xover is (predictably) only 12dB/Oct., which is the same slope as the target. So if the tweeter response is made to approximate the same slope as the target, there can’t be any attenuation at low frequencies.
In my system as described above, the response of the tweeter’s Xover, ie the voltage response across the tweeters terminals, takes the shape of an inverse Linkwitz Transform with only 19dB-20dB attenuation at all frequencies lower than 800Hz. This worries me because with a 100 watt amplifier driving the tweeter Xover, the tweeter will potentially have to handle 1watt of signal power at all frequencies below 800Hz ie, 5.6 Vp-p signals.
I suspect that this could cause significant amounts of IM distortion, which may not be masked by the low frequency signal.
This issue together with the substantial amount of overshoot it creates on square wave signals really limits its appeal to me.
Peter
Very informative results indeed. Agreed on the point about tweeter protection. A Harsch 2-way that's not FAST would require a very clean and robust tweeter that can go down low, which the XT25 isn't even with waveguide loading. I suspect a conventional dome with great low-end credentials would do better by allowing the Bessel to be dialed in as the tweeter's intrinsic roll-off would occur well into the stop band. Perhaps something like a waveguided SEAS 27TDFC/TBFCG or even Scan 6600. The large Heil AMTs would like do well too, being clean to 700Hz. Now that's a thought.
Anybody other than Xrk tried the other way round? That is, BW4 acoustical on the tweeter and Bessel2 on the woofer. That would certainly be much more achievable and safe.
Hi XRT921,
I recently finished construction of an MTM design using an old pair of Vifa M18WO-09-08 drivers together with a Vifa XT25TG30-04 mounted on a Pellegrene elliptical waveguide No 85125 in a Parts Express 1cf enclosure.
When I first started this project I had already decided to make this system active with a LR4 Xover implemented in a Minidsp since I’ve had significant success in the past with this device.
However, after having read about the S. Harsch Xover, I thought it might be interesting to try it out on my new MTM system, just to see what all the hype was about.
I started, as I normally do, by taking a 1m and nearfield response of the bass/mid-range driver and port together with a 1m response of the tweeter. I then constructed the target curves defined by S. Harsch and set about making the acoustic responses of the bass/mid-range driver and tweeter fit the target curves via the various biquads in the Minidsp.
The results are shown attached. The Xover frequency is set for 2KHz and I found that the flattest response was obtained with a tweeter delay of between 280uS and 300uS, which is reasonably close to the recommended 250uS for this Xover frequency. The measured step and group delay responses are also attached. I think the FR could be made flatter with 290uS, but the Minidsp can only increment 20uS steps (1/48KHz = 20.83uS)
One of my observations was that the measured acoustic slope of the tweeter without the Xover is (predictably) only 12dB/Oct., which is the same slope as the target. So if the tweeter response is made to approximate the same slope as the target, there can’t be any attenuation at low frequencies.
In my system as described above, the response of the tweeter’s Xover, ie the voltage response across the tweeters terminals, takes the shape of an inverse Linkwitz Transform with only 19dB-20dB attenuation at all frequencies lower than 800Hz. This worries me because with a 100 watt amplifier driving the tweeter Xover, the tweeter will potentially have to handle 1watt of signal power at all frequencies below 800Hz ie, 5.6 Vp-p signals.
I suspect that this could cause significant amounts of IM distortion, which may not be masked by the low frequency signal.
This issue together with the substantial amount of overshoot it creates on square wave signals really limits its appeal to me.
Peter
Thanks for trying this out - you did a fantastic job of matching it to the textbook curves and the final SR shows it. You might try flipping it around as Quip suggested with BW4 on tweeter and Bessel on woofer. Or maybe add an additional PEQ at somewhere below XO to help attenuate the tweeter some more. Great results though. How does it sound?
- Home
- Loudspeakers
- Multi-Way
- S. Harsch XO