I see how it works. It will indeed not skate. It will pass my "string test". Well done.
Ray K
Hello Ray K,
Thank you.
When I get that video made, I will deliberately jiggle my turn-table stand to show how the cradle is independent of the head-shell.
Sincerely,
Ralf
Hello ThomasA,
First of all, thank you.
At the front of my tone arm there is a part I call the "cradle" which is an integral part of the tone arm. The head-shell "floats" upon this cradle, supported by five precision ball bearings. As the independently floating head-shell tracks the groove, the cradle supports it from underneath being kept centered under the head-shell by the electronic servo, thus no skating.
I have not gotten around to posting the video of my tone arm that I promised.
Once you see that video, it will remove all doubt. I hope I will get around to it this week-end.
If that explanation is not clear, please let me know and I'll try again.
Sincerely,
Ralf
Thanks, a video should help. (I understand the moving headshell above, but how the pivot to stylus line is constantly kept in the groove tangent direction.)
ThomasA,
Picture a Revox linear arm. It has a short stubby "arm" slightly longer than the cartridge itself, with the pivot just behind the cartridge. The friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and moves the cartridge pivot in a straight line across the record surface.
Now envision the Revox stubby arm mounted in the "cradle" on the end of a conventional pivoted arm having an offset angle and overhang. The key difference in this case being, the pivoted arm is moved by the servo, not by the stylus having to do any work. The servo moves the cradle at the end of the arm in an arc across the record surface instead of along a linear track. The pivot behind the cartridge is fixed in the cradle and the cartridge can't tell whether it's mounted in a Revox arm or Ralf's arm as far as skating is concerned. In either case, the friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and swings the cartridge in an arc across the record surface.
I don't mean to compare Ralf' arm to a Revox in any way except as a learning tool to visualize and understand how it can function as a pivoting tangential arm and yet have NO skating force nor frictional side forces associated with passive mechanical linear arms.
I get it and I'm convinced as far as skating is concerned, but now I'm beginning to wonder if it's susceptible to the same tracking angle error issues of conventional pivoted arms having an offset angle and overhang. Hmmm...
Ray K
Picture a Revox linear arm. It has a short stubby "arm" slightly longer than the cartridge itself, with the pivot just behind the cartridge. The friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and moves the cartridge pivot in a straight line across the record surface.
Now envision the Revox stubby arm mounted in the "cradle" on the end of a conventional pivoted arm having an offset angle and overhang. The key difference in this case being, the pivoted arm is moved by the servo, not by the stylus having to do any work. The servo moves the cradle at the end of the arm in an arc across the record surface instead of along a linear track. The pivot behind the cartridge is fixed in the cradle and the cartridge can't tell whether it's mounted in a Revox arm or Ralf's arm as far as skating is concerned. In either case, the friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and swings the cartridge in an arc across the record surface.
I don't mean to compare Ralf' arm to a Revox in any way except as a learning tool to visualize and understand how it can function as a pivoting tangential arm and yet have NO skating force nor frictional side forces associated with passive mechanical linear arms.
I get it and I'm convinced as far as skating is concerned, but now I'm beginning to wonder if it's susceptible to the same tracking angle error issues of conventional pivoted arms having an offset angle and overhang. Hmmm...
Ray K
ThomasA,
Picture a Revox linear arm. It has a short stubby "arm" slightly longer than the cartridge itself, with the pivot just behind the cartridge. The friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and moves the cartridge pivot in a straight line across the record surface.
Now envision the Revox stubby arm mounted in the "cradle" on the end of a conventional pivoted arm having an offset angle and overhang. The key difference in this case being, the pivoted arm is moved by the servo, not by the stylus having to do any work. The servo moves the cradle at the end of the arm in an arc across the record surface instead of along a linear track. The pivot behind the cartridge is fixed in the cradle and the cartridge can't tell whether it's mounted in a Revox arm or Ralf's arm as far as skating is concerned. In either case, the friction force vector, the line tangent to the groove at the stylus tip, and the line between the stylus tip to the pivot are all in the same plane so there is no skating. The servo keeps everything lined up and swings the cartridge in an arc across the record surface.
I don't mean to compare Ralf' arm to a Revox in any way except as a learning tool to visualize and understand how it can function as a pivoting tangential arm and yet have NO skating force nor frictional side forces associated with passive mechanical linear arms.
I get it and I'm convinced as far as skating is concerned, but now I'm beginning to wonder if it's susceptible to the same tracking angle error issues of conventional pivoted arms having an offset angle and overhang. Hmmm...
Ray K
I was thinking about it and it may be as you say. I just have to draw some geometric pictures to understand. I was a bit curious since such an arm with a moving overhang/effective length would not have to have an offset headshell, which this one has. But then I have not thought so much about it, so a video could help.
")
Thank for the observation, Ray. It really helps in understanding the design.
From what I see, if we don't count the floating headshell/cradle, there's really no horizontal pivot at all -- the Reed 5T at least has a horizontal pivot at the sensor area. The swing arm pivots vertically only and is just there for applying tracking force and it acts like a "holder" of the cradle. Essentially the arm is a non-parallel tracking servo arm that has the appearance of a traditional pivot arm.
Is the arm aligned underhang or overhang or neutral?
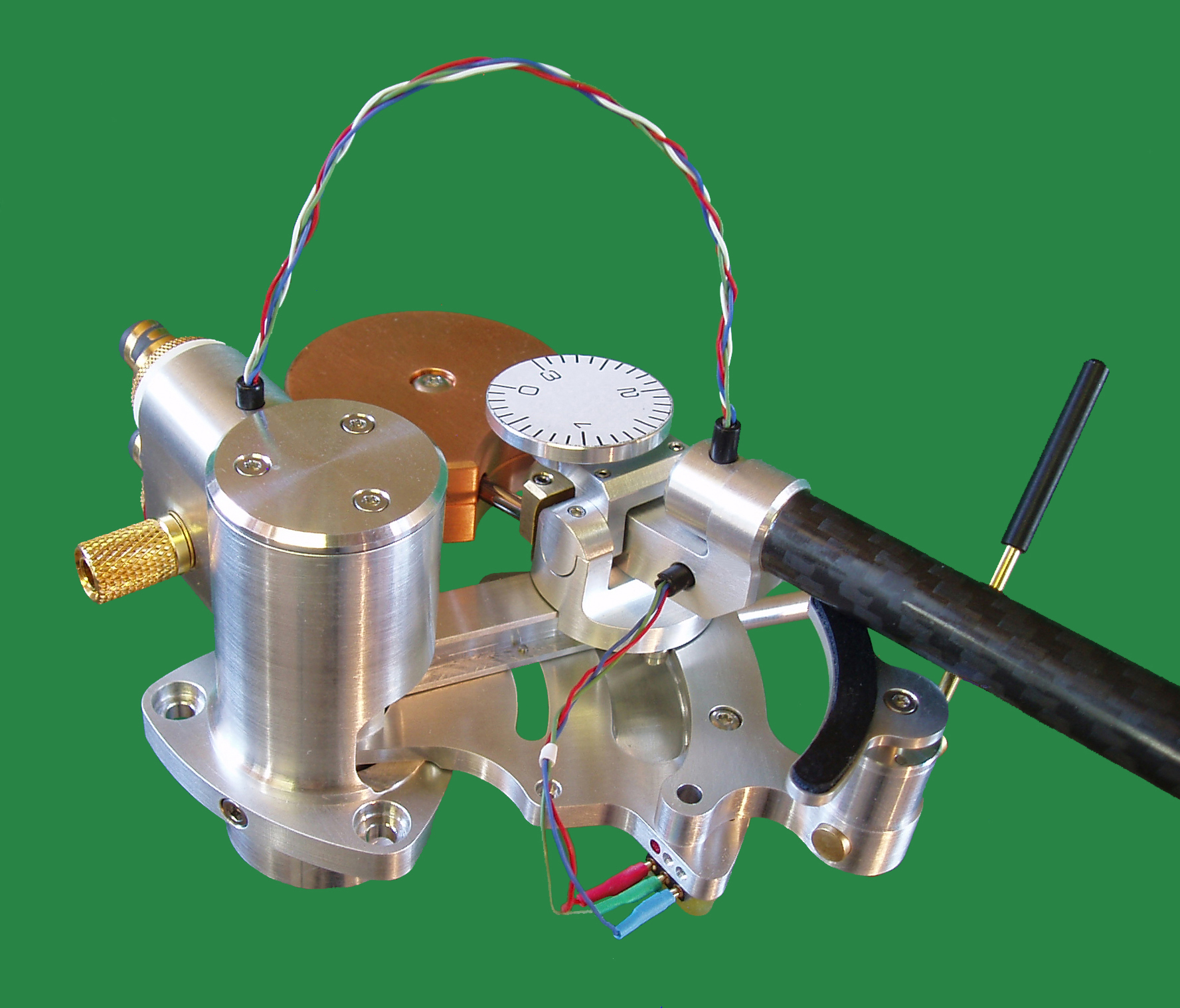
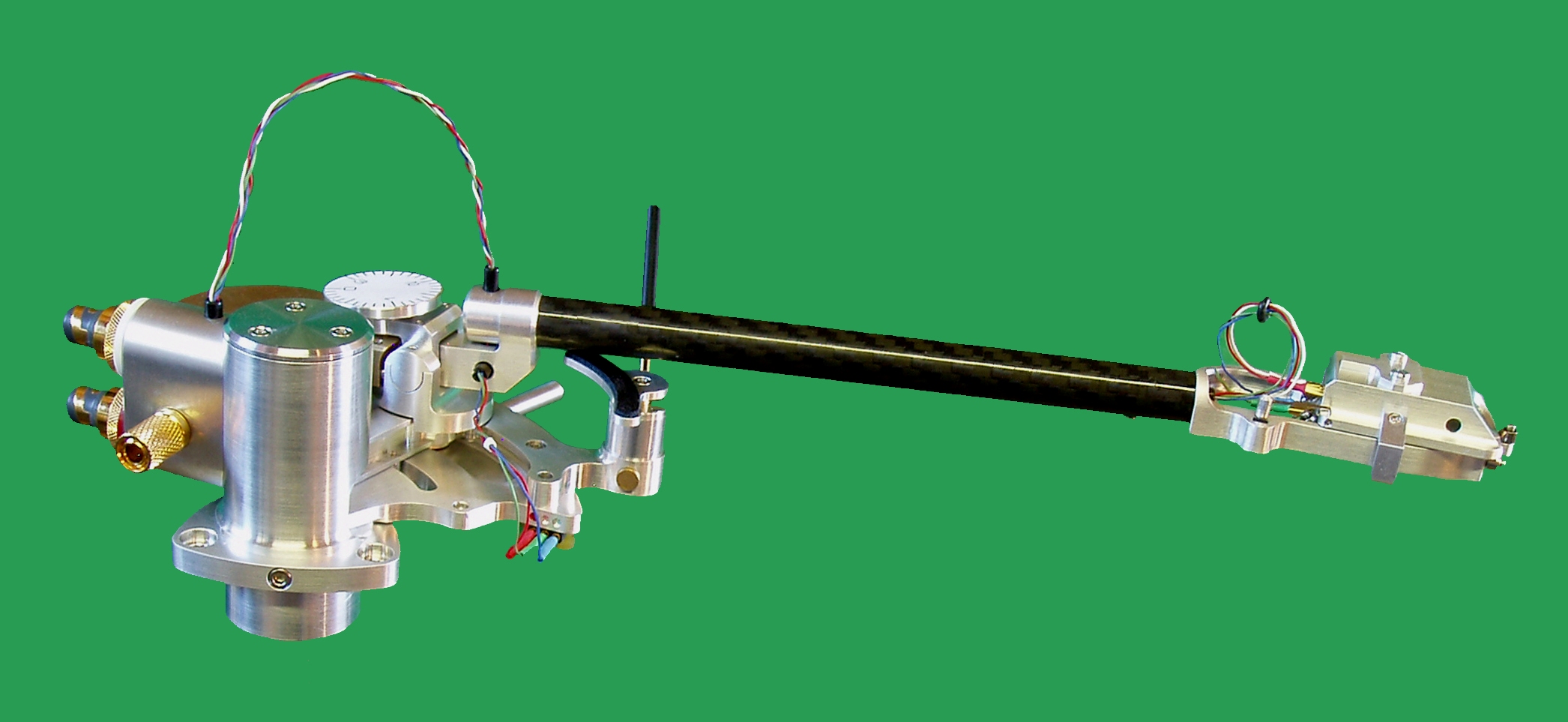
I would love to see the motorized part of the arm.
From what I see, if we don't count the floating headshell/cradle, there's really no horizontal pivot at all -- the Reed 5T at least has a horizontal pivot at the sensor area. The swing arm pivots vertically only and is just there for applying tracking force and it acts like a "holder" of the cradle. Essentially the arm is a non-parallel tracking servo arm that has the appearance of a traditional pivot arm.
Is the arm aligned underhang or overhang or neutral?
I would love to see the motorized part of the arm.
Last edited:
Hello Ralf, again my compliments, already done elsewhere, not only for the super realization (sunday machinists know well how much work&skill it requires) but because you're beating a really new path. Since the word servo (or linear) turns off my attention initially i've only admired it, but now I'm trying to understand the scope of your design, so different even from your previous achievements.
Your revolution seems to be something like two overlapping arms, collaborating but independent.
The sub-arm A (base + shaft + cradle) just puts the headshell on the proper position for tracking (following a "non birch" arc described by a point on the rectangles tangent to the spindle, like Schuch and others?).
First question: is a servo really necessary for this?
The sub-arm B (floating headshell) is free to self-align, thanks to the stylus drag. (is the "second effect" of the offset what also mentioned in Dd's thread, when speaking of Baerwald benefits - #1548 and others ?). and drives the sub-arm A.
Second question: is the sensor really necessary? those 2 angled bearings are not enough?
And now some doubts:
1 - even if the floating headshell seems very different either from the fixed one of the Revox (mentioned by Ray), or the rotating one RS like, holding the resonances locally into a separate small mass may show similar problems? (compliance etc)
2 - If the servo controls the drag, is the subarm A that determines the tracking angle or the opposite? (how - with the lever of the cantilever?)
3 - is a floating headshell able to maintain a correct VTA (pitch&roll) while tracking?
4 - And - last - speaking of VTF, may the floating head take off on warps, suddenly increasing it?
Many confused questions, sorry; of course the need to protect your design must be respected, I do not expect direct answers.
Thanks - carlo
Your revolution seems to be something like two overlapping arms, collaborating but independent.
The sub-arm A (base + shaft + cradle) just puts the headshell on the proper position for tracking (following a "non birch" arc described by a point on the rectangles tangent to the spindle, like Schuch and others?).
First question: is a servo really necessary for this?
The sub-arm B (floating headshell) is free to self-align, thanks to the stylus drag. (is the "second effect" of the offset what also mentioned in Dd's thread, when speaking of Baerwald benefits - #1548 and others ?). and drives the sub-arm A.
Second question: is the sensor really necessary? those 2 angled bearings are not enough?
And now some doubts:
1 - even if the floating headshell seems very different either from the fixed one of the Revox (mentioned by Ray), or the rotating one RS like, holding the resonances locally into a separate small mass may show similar problems? (compliance etc)
2 - If the servo controls the drag, is the subarm A that determines the tracking angle or the opposite? (how - with the lever of the cantilever?)
3 - is a floating headshell able to maintain a correct VTA (pitch&roll) while tracking?
4 - And - last - speaking of VTF, may the floating head take off on warps, suddenly increasing it?
Many confused questions, sorry; of course the need to protect your design must be respected, I do not expect direct answers.
Thanks - carlo
Last edited:
First question: is a servo really necessary for this?
Second question: is the sensor really necessary? those 2 angled bearings are not enough?
And now some doubts:
1 - even if the floating headshell seems very different either from the fixed one of the Revox (mentioned by Ray), or the rotating one RS like, holding the resonances locally into a separate small mass may show similar problems? (compliance etc)
2 - If the servo controls the drag, is the subarm A that determines the tracking angle or the opposite? (how - with the lever of the cantilever?)
3 - is a floating headshell able to maintain a correct VTA (pitch&roll) while tracking?
4 - And - last - speaking of VTF, may the floating head take off on warps, suddenly increasing it?
Many confused questions, sorry; of course the need to protect your design must be respected, I do not expect direct answers.
Thanks - carlo
Hello Carlo,
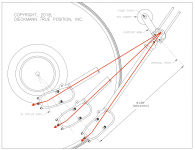
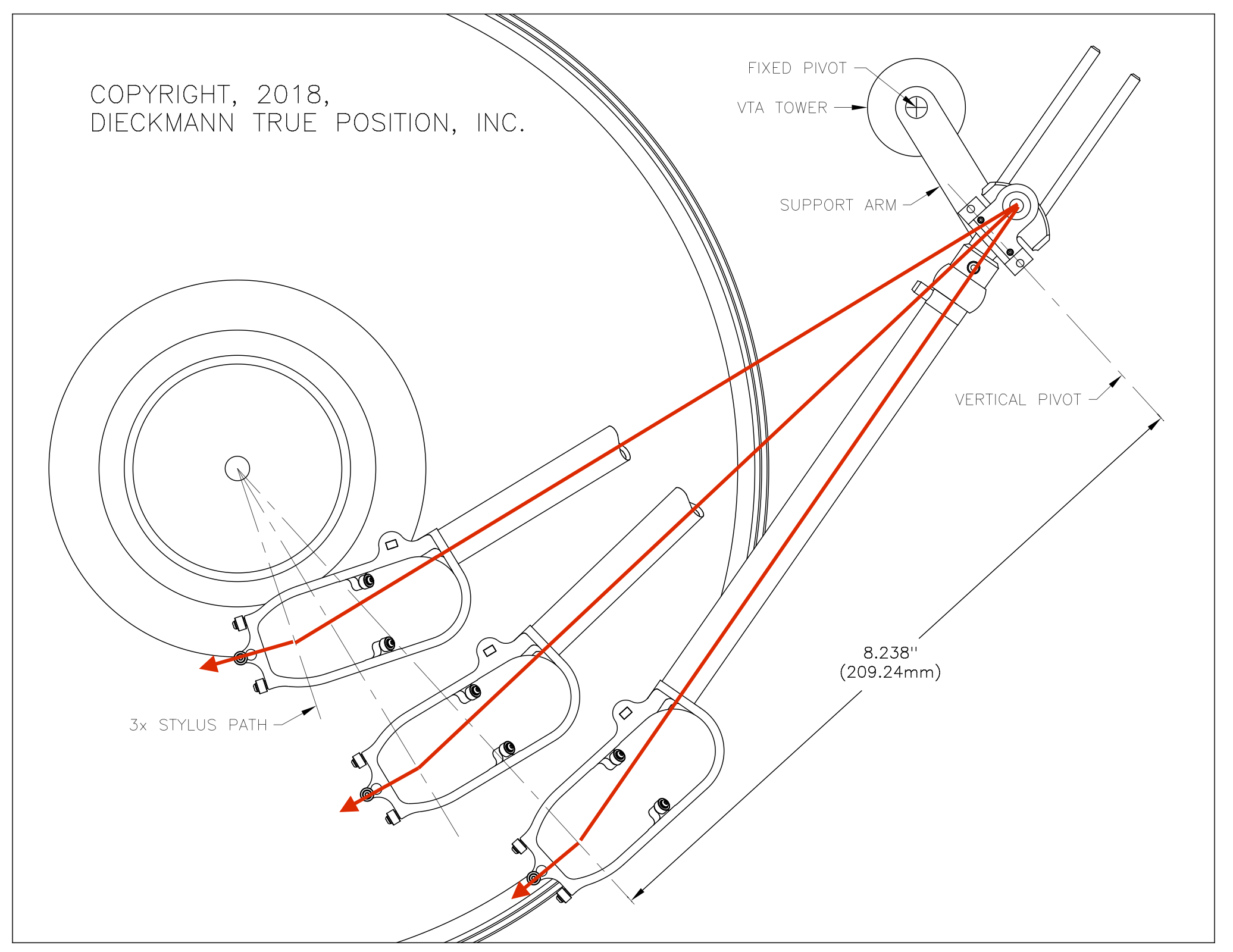
please look at the CAD drawing I have attached, while reading the following:
The CAD drawing shows the tone arm/cradle assembly by itself in the start, mid and end positions. Ignore, for the time being, the head-shell, the sensor and the servo control. The tone arm can only move in the vertical and horizontal planes. The latter motion is governed by a simple control mechanism hidden in the base of the tone arm. In the CAD drawing you will see three "stylus path lines", drawn at right angles to the cradle and intersecting the turn table spindle. The control mechanism mentioned above, insures that the stylus path lines CANNOT deviate from intersecting the turn-table spindle from start to finish!
If we now set the head-shell on top of the cradle, and lower the tone arm onto the LP, the drag force moves the head-shell forward against the cradle, which, by virtue of its offset, is forced toward the center of the LP. Under the above conditions, the inward bound cradle would strike the head-shell if it were not for the servo. The servo applies just enough reverse force to the cradle to keep it centered under the head-shell. If the servo applied a constant reverse force, it would not work because the frictional drag varies constantly. And that is where the sensor comes in. It senses the variations of the drag and causes the servo to apply just the right degree of reverse force.
It is important to understand, that this servo controlled tone arm does not exhibit the so-called servo error that all traditional servo tone arms have.
I think I have answered at least some of your questions above.
About the two angled bearings: They prevent any "lost motion" between the head-shell and the cradle. There are no loose bearings, they are all preloaded.
And now to the remaining doubts/questions:
1) I don't own sophisticated test equipment except my ears and some CBS test records.
it will be up to a "golden ears" in the future to tell me how good my tone arm is.
3) Absolutely.
4) I am planning to make a video, maybe this coming weekend. It must be seen how the head-shell maintains solid contact with the cradle.
I have been listening with my tone arm for months now and it functions flawlessly.
Sincerely,
Ralf
Attachments
Last edited:
Ralf,
Your arm gets more intriguing with each new post. Thanks for the drawing. So, if I understand right, you're using skating as a controlling factor. That's not just clever, it's devious.
To answer your previous question about why I decided against chasing commercial possibilities, I'm 77 and going to my shop, tinkering, occasionally making something interesting, is play, but when I started thinking about all the elements that have to be considered in selling any product and especially in a niche market, I decided no, that's not play any more. Twenty years ago, I'd have jumped in, but at this point I don't think I'm up to it.
However, I think you've aimed at commercial production of your arm from the beginning and I really hope you're able to make that happen. It would be exciting to see real world validation of your effort.
Your arm gets more intriguing with each new post. Thanks for the drawing. So, if I understand right, you're using skating as a controlling factor. That's not just clever, it's devious.
To answer your previous question about why I decided against chasing commercial possibilities, I'm 77 and going to my shop, tinkering, occasionally making something interesting, is play, but when I started thinking about all the elements that have to be considered in selling any product and especially in a niche market, I decided no, that's not play any more. Twenty years ago, I'd have jumped in, but at this point I don't think I'm up to it.
However, I think you've aimed at commercial production of your arm from the beginning and I really hope you're able to make that happen. It would be exciting to see real world validation of your effort.
I am not sure that this arm doesn't have skating force. From stylus point to main pivot, it always forms an angle, so, skating force exists. If the servo applies a force to counter skating force, it only mean the arm has almost perfect level of anti skating force. In other words, it has active anti-skating. However, skating does exist.
Last edited:
Ralf,
Your arm gets more intriguing with each new post. Thanks for the drawing. So, if I understand right, you're using skating as a controlling factor. That's not just clever, it's devious.
To answer your previous question about why I decided against chasing commercial possibilities, I'm 77 and going to my shop, tinkering, occasionally making something interesting, is play, but when I started thinking about all the elements that have to be considered in selling any product and especially in a niche market, I decided no, that's not play any more. Twenty years ago, I'd have jumped in, but at this point I don't think I'm up to it.
However, I think you've aimed at commercial production of your arm from the beginning and I really hope you're able to make that happen. It would be exciting to see real world validation of your effort.
Hello Doug,
Thank you. I am not normally a devious man, but in this case I'll take it as a compliment.
I have eight US patents but made only a few hundred Dollars on one of them, a halogen machine light. I found out a long time ago, that inventing is the easy part. most patented inventions fall by the wayside.
I'll make some comments regarding skating in my answer to "super 10018 below.
Sincerely,
Ralf
Thanks for the CAD,
I don't understand from the picture how the friction force vector (tangent of the groove motion) is the same as the line/vector between arm pivot and tylus point.
Hello ThomasA,
You are welcome.
I am sorry, but I don't understand the underlined part of your question.
Sincerely,
ralf
I am not sure that this arm doesn't have skating force. From stylus point to main pivot, it always forms an angle, so, skating force exists. If the servo applies a force to counter skating force, it only mean the arm has almost perfect level of anti skating force. In other words, it has active anti-skating. However, skating does exist.
Hello super 10018,
you are partially correct. As everyone knows, skating is the tendency of the stylus to climb the 45 degree groove wall of the right hand stereo channel that can damage the vinyl and/or the stylus/cantilever assembbly and is to be avoided. My tone arm does no such thing! Although my tone arm experiences an inside force, that force does not translate into stylus skating because the head-shell is not constrained laterally by the tone arm.
While the inside force in pivoting tone arms is undesirable, it is highly desirable in my tone arm design.
Sincerely,
Ralf
Many thanks, Ralf, for the extensive answers and helpful drawing.
Now that's my idea on how this arm works: probably wrong, and you will certainly snigger of my ingenuity. But this is Diy Audio, and here we try to understand, even at the risk to show our stupidity.
Suppose we have a floating headshell, to be aligned tangentially with the groove. (that's why we try to build these damn PLTs). We must therefore have a line: that is, two points, not one. The first is certainly the contact of the tip with the groove, the second must be the point of application of the force = the pivot on which the headshell rotates.
Was said that, being floating, there is no - real or virtual - pivot, (no offset pivot = no skating) but in this case the headshell would be free to rotate 360 ° (at least with a conical tip). So this constraint must exist, and everything suggests that it must be along the axis that controls the drag. So not really floating, maybe rotating + sliding.
Till now I could not see a real difference with a normal Birch, a Non-Birch - or even a Thales.
But this arm is not simply mechanic, with continous feedback between the chain of parts, here we have a servo. Used not just to move the arm, as everyone one may think, but to act as an unidirectional "valve": the arm A knows well where is the headshell, and where it must be positioned - the headshell B instead feels alone in the world, and - due the stylus drag - rotates the only way it can, moving along the cradle. And the cradle can be found always where it must be, tangent to the groove. Better, angled the little bit necessary to get a resultant side force near to 0.
Bravo, Ralf. - in italian, as for best performers
carlo
"I have been listening with my tone arm for months now and it functions flawlessly.
Glad for your result: only real arms can dispel theoretical doubts
Last question: the servo acts on the fixed pivot, or both?
Now that's my idea on how this arm works: probably wrong, and you will certainly snigger of my ingenuity. But this is Diy Audio, and here we try to understand, even at the risk to show our stupidity.
Suppose we have a floating headshell, to be aligned tangentially with the groove. (that's why we try to build these damn PLTs). We must therefore have a line: that is, two points, not one. The first is certainly the contact of the tip with the groove, the second must be the point of application of the force = the pivot on which the headshell rotates.
Was said that, being floating, there is no - real or virtual - pivot, (no offset pivot = no skating) but in this case the headshell would be free to rotate 360 ° (at least with a conical tip). So this constraint must exist, and everything suggests that it must be along the axis that controls the drag. So not really floating, maybe rotating + sliding.
Till now I could not see a real difference with a normal Birch, a Non-Birch - or even a Thales.
But this arm is not simply mechanic, with continous feedback between the chain of parts, here we have a servo. Used not just to move the arm, as everyone one may think, but to act as an unidirectional "valve": the arm A knows well where is the headshell, and where it must be positioned - the headshell B instead feels alone in the world, and - due the stylus drag - rotates the only way it can, moving along the cradle. And the cradle can be found always where it must be, tangent to the groove. Better, angled the little bit necessary to get a resultant side force near to 0.
Bravo, Ralf. - in italian, as for best performers
carlo
"I have been listening with my tone arm for months now and it functions flawlessly.
Glad for your result: only real arms can dispel theoretical doubts
Last question: the servo acts on the fixed pivot, or both?
Last edited:
Hello ThomasA,
You are welcome.
I am sorry, but I don't understand the underlined part of your question.
Sincerely,
ralf
Dear ralf, see my pic based on you CAD. Hope it helps to understand what I wonder about.
Attachments
observations
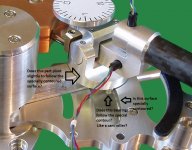
My understanding of the arm is that there's really NO horizontal pivot at all. The arm and cradle are acting like a "holder" on a path for the floating headshell. The arm LOOKS like a pivot arm but it does not pivot horizontally during play. There's no passive horizontal pivoting. The servo is there to provide a longer path for the headshell to track tangentially into the spindle. If the cradle is, hypothetically, 4 inches wide at a curve, you wouldn't even need a servo. The servo is not there to correct error like most servo arms. It does not do the usual "crabbing" across record a la Goldmund. The servo is there to extend the runway for the floating headshell and it just so happens that its motorized base move pivotally. As the headshell starts floating in towards the spindle, the cradle eventually runs out of space for the headshell to glide on, therefore the servo tells the motor to pivot inwards. Therefore, the servo is not correcting error, it is to extend the path way. If you don't have a motor, you can nudge the armbase forward every 30 seconds or so and it is indeed what Ralf did at the early stage of the design. And the vertical arm also provides the floating headshell a way to apply tracking force. The arrangement of the 5 ball bearings allows the headshell to glide only in and out of the record center but inhibits it to move forward and backward so it's not totally free "floating". It's more of a gliding headshell. On the horizontal plane, there's no rotational movement or pivoting for the headshell on the cradle. And in Ralf's 2D drawing, it shows no pivot point at the base of the vertical arm. I think if the arm is reconfigured as a parallel tracker, the design would be easier to grasp.
So far that's my understanding of it and I could be completely wrong and/or I'm sure I have missed some details. By the way, I think the design is brilliant.
These two pictures show that the vertical arm is inhibited from pivoting horizontally.
In your picture, the converging point is NOT a pivot. There isn't any.
If there is, it would be very very small and it's not passive and it would be active and tied into the servo system.
My understanding of the arm is that there's really NO horizontal pivot at all. The arm and cradle are acting like a "holder" on a path for the floating headshell. The arm LOOKS like a pivot arm but it does not pivot horizontally during play. There's no passive horizontal pivoting. The servo is there to provide a longer path for the headshell to track tangentially into the spindle. If the cradle is, hypothetically, 4 inches wide at a curve, you wouldn't even need a servo. The servo is not there to correct error like most servo arms. It does not do the usual "crabbing" across record a la Goldmund. The servo is there to extend the runway for the floating headshell and it just so happens that its motorized base move pivotally. As the headshell starts floating in towards the spindle, the cradle eventually runs out of space for the headshell to glide on, therefore the servo tells the motor to pivot inwards. Therefore, the servo is not correcting error, it is to extend the path way. If you don't have a motor, you can nudge the armbase forward every 30 seconds or so and it is indeed what Ralf did at the early stage of the design. And the vertical arm also provides the floating headshell a way to apply tracking force. The arrangement of the 5 ball bearings allows the headshell to glide only in and out of the record center but inhibits it to move forward and backward so it's not totally free "floating". It's more of a gliding headshell. On the horizontal plane, there's no rotational movement or pivoting for the headshell on the cradle. And in Ralf's 2D drawing, it shows no pivot point at the base of the vertical arm. I think if the arm is reconfigured as a parallel tracker, the design would be easier to grasp.
So far that's my understanding of it and I could be completely wrong and/or I'm sure I have missed some details. By the way, I think the design is brilliant.
These two pictures show that the vertical arm is inhibited from pivoting horizontally.
Dear ralf, see my pic based on you CAD. Hope it helps to understand what I wonder about.
In your picture, the converging point is NOT a pivot. There isn't any.
If there is, it would be very very small and it's not passive and it would be active and tied into the servo system.
Last edited:
the different angles of the arm pictured must mean that there is a movement of it (servo or not).
There is NO angle because there is NO pivot. It's a fixed form. It is NOT a pivot arm on the horizontal plane.
Last edited:
I see how it works. It will indeed not skate. It will pass my "string test". Well done.
Ray K
Ralf,
On second thought, information in subsequent posts makes me suspect I had initially made erroneous assumption(s) about how the arm works, and I'm now reaching for my string. Let me play "20 questions". Here are my first few:
Ray K
Attachments

- Home
- Source & Line
- Analogue Source
- A Revolutionary Pivoting Tangential Tone Arm