Total brain fart moment, yeh it's 16 per platter revolution not motor revolution. Let me run downstairs and see what the pulley ratio is....
Mine is slightly different to Mark's, but mine is 7.5x so it could relate to an asymmetry on the pulley. But given that they were CNC machined and parted off in a single process all on the same centre I'd doubt that's the cause. Maybe the interference fit onto the shaft could cause some distortion in the pulley, maybe, it's not really 'that' tight though. It would seem to be the obvious numerical culprit though...
mmmm..
So 16 bumps per rev is roughly 8.5hz, much more likely to be tonearm/suspension mode.
Mine is slightly different to Mark's, but mine is 7.5x so it could relate to an asymmetry on the pulley. But given that they were CNC machined and parted off in a single process all on the same centre I'd doubt that's the cause. Maybe the interference fit onto the shaft could cause some distortion in the pulley, maybe, it's not really 'that' tight though. It would seem to be the obvious numerical culprit though...
mmmm..
So 16 bumps per rev is roughly 8.5hz, much more likely to be tonearm/suspension mode.
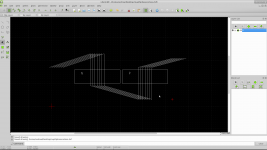
I don't know whether this is completely obvious to everyone already but I've never really seen hardware like I was talking about in the field. I'm also not a huge CAD whiz so I made a really simplified drawing to show.
The example drawing appears to be a linear arrangement with 7 phases, but the actual implementation would be a circular axial field PM array with contiguous windings.
However, drive would be 7 phases at a time (for sake of this example). Gap flux density in this center region of the pole faces should be fairly constant. So long as the back-end winding were ramped down with current at the exact same rate as the leading winding were ramped up, you'd have nice low torque ripple. Of course the more phases you have, the less average force is involved with the 2 that are switched at any particular time. Power density would be low compared to having all phases under the poles active, but we are probably not as interested in that, or efficiency, compared to smoothness of output. End windings are large so again efficiency would take a hit. Shielding is a serious problem.
The example drawing appears to be a linear arrangement with 7 phases, but the actual implementation would be a circular axial field PM array with contiguous windings.
However, drive would be 7 phases at a time (for sake of this example). Gap flux density in this center region of the pole faces should be fairly constant. So long as the back-end winding were ramped down with current at the exact same rate as the leading winding were ramped up, you'd have nice low torque ripple. Of course the more phases you have, the less average force is involved with the 2 that are switched at any particular time. Power density would be low compared to having all phases under the poles active, but we are probably not as interested in that, or efficiency, compared to smoothness of output. End windings are large so again efficiency would take a hit. Shielding is a serious problem.
Attachments
Power density I don't see as a problem, as we are not talking about radio station use cases any more. Some of the motor control boards have DSP to handle real time flux measurement. for DD duty the rotation speeds appear too slow to be able to use that technique but there are other things we can throw at the problem to smooth things out.
If the motor is turning too slowly my understanding is that there is not enough rate of change of flux for the Code to work out what is going on. The technique was developed for motors doing 1000RPM and up. So sensorless motor drive is possibly off the table, but I want to try it and see.
Yes, for what I'm thinking at least one hall sensor would be in the mix, with very simple logic. Although you could do most if not all of the current control with a modern microcontroller, I'd probably have more luck with linear regulators. ") Ramp up and down current might be just as clean or better to do in software, maybe even with feedback, if you wanted to get fancy. At very low velocity the coil inductance / back EMF kinda falls out of the picture.
Ramp up and down current might be just as clean or better to do in software, maybe even with feedback, if you wanted to get fancy. At very low velocity the coil inductance / back EMF kinda falls out of the picture.
Ramp up and down current might be just as clean or better to do in software, maybe even with feedback, if you wanted to get fancy. At very low velocity the coil inductance / back EMF kinda falls out of the picture.DRV8308 | Brushless DC Gate Drivers | Brushless DC (BLDC) Drivers | Description & parametrics does it all for you including being able to switch to current drive once you are at speed.
InstaSPIN?-BLDC Solution - INSTASPIN-BLDC - TI Software Folder is where it starts to get complex. But like all TI documentation its hard to find out what it can and can't do. I suspect it doesn't gain one anything at 33.3 RPM, but will try it if I can score an EVM.
InstaSPIN?-BLDC Solution - INSTASPIN-BLDC - TI Software Folder is where it starts to get complex. But like all TI documentation its hard to find out what it can and can't do. I suspect it doesn't gain one anything at 33.3 RPM, but will try it if I can score an EVM.
Neat part. I worry that PWM is 'unnecessary" in this application. You know, the fewer switching events, the better. It will take some time for me to completely eat that datasheet. There seems to be plenty of complexity in that.
I may have missed in previous posts, but is there a certain magnetic topology you intend to explore first? Another benefit of the coreless arrangement is zero "off axis" force, so no weird ancillary flexures to contend with. We are, after all, talking about extreme performance?
I may have missed in previous posts, but is there a certain magnetic topology you intend to explore first? Another benefit of the coreless arrangement is zero "off axis" force, so no weird ancillary flexures to contend with. We are, after all, talking about extreme performance?
PWM is a useful way of reducing power dissipation and giving you the ability to easily change the drive waveform. Just think of it as class D drive.
I haven't decided yet. This is a long term project mainly because there is so much rubbish posted about DD I thought it would be nice to try and accurately tease out all the issues. It started when I was given a kenwood KD-550, and then I started collecting motors and assembling notes. The technics green motor should be my initial focus as there are so many millions of those out there. Interestingly its not an optimal pole/slot ratio for low cogging* so although no necessarily the best candidate from a performance standpoint its a good one for measuring the problem and trying to reduce it. The pancakes offer a lot more flexibility in mounting and in platter choice so you can consider heretical things like replacing a Rega with DD.
Shall see. This is a long term thing so not going to promise anything, just collecting parts and references.
Bill
* most low and mid end stuff is an even pole:slot ratio so SL-1200 is 4 pole 12 slot for a ratio of 3. Fractional ratios are better for 'cogging' and the manufactures knew that and did it for their top of the line models in some cases. But I enjoy getting something that was £5 off ebay working better.
I haven't decided yet. This is a long term project mainly because there is so much rubbish posted about DD I thought it would be nice to try and accurately tease out all the issues. It started when I was given a kenwood KD-550, and then I started collecting motors and assembling notes. The technics green motor should be my initial focus as there are so many millions of those out there. Interestingly its not an optimal pole/slot ratio for low cogging* so although no necessarily the best candidate from a performance standpoint its a good one for measuring the problem and trying to reduce it. The pancakes offer a lot more flexibility in mounting and in platter choice so you can consider heretical things like replacing a Rega with DD
. Shall see. This is a long term thing so not going to promise anything, just collecting parts and references.
Bill
* most low and mid end stuff is an even pole:slot ratio so SL-1200 is 4 pole 12 slot for a ratio of 3. Fractional ratios are better for 'cogging' and the manufactures knew that and did it for their top of the line models in some cases. But I enjoy getting something that was £5 off ebay working better.
I just watched this half-hour video, I think it gives promise for using TI's "InstaSPIN" for an arbitrarily slow 3-phase motor. It basically tells how things work without having to read through and understand the actual code:
https://www.youtube.com/watch?v=szgVUfyX8JM
https://www.youtube.com/watch?v=szgVUfyX8JM
It would be interesting to try the InstaSpin solution on a DD table, but I don't think the results will be very good. TI is still using a 2 phase trapezoidal drive signal and sensorless feedback for the speed control. You will still get torque ripple (cogging) and speed control will be coarse.
I've been searching TI's website (and others) but cannot find a DSP application for sinewave commutation of these motors.
I've been searching TI's website (and others) but cannot find a DSP application for sinewave commutation of these motors.
I wouldn't worry about going class D for a sub-1 Watt steady state application. Many consumers of this application might be running class A tube amps anyway... Trapezoidal drive is fine at DD frequencies. I'd be most interested in getting coil drive balanced up/down in linear mode. If you could do that, both electrical and mechanical noise would be very low, especially for massive multi-phase. Doesn't seem too hard to do. Then again, I don't even own a TT myself..
Sorry been out of internet coverage for a few days. I hadn't been planning on getting too down and dirty until I'd done some proper research, but questions are being asked so here is what I know so far...
First off, as I mentioned, TI documentation is horrendously complicated and confusing. This makes finding answers complicated. It is made worse by the fact that there are multiple solutions that come under the instaspin heading. The document that is best to look at is http://www.ti.com/lit/ug/spruhj1f/spruhj1f.pdf . It's a big document but does cover the software APIs. A lot of the stuff that has been developed we just don't need so there is some panning for gold. Can't blame them too much though as this is really not the market they are aiming for.
The part I am currently unpicking is regarding the difference between Instaspin-FOC and Instaspin-motion. In particular a chunk of marketing called 'spin-tac' which may contain some code blocks that are useful. Eventually I will get to the bottom of what code runs on what processor and what it does, but it's very much a long term research project as DRV8308 seems to offer most of what is needed in a cheapish EVM.
It is entirely possible that a coreless motor with high intertia platter offers more than any fancy control algorithm, but if we don't try we won't know.
First off, as I mentioned, TI documentation is horrendously complicated and confusing. This makes finding answers complicated. It is made worse by the fact that there are multiple solutions that come under the instaspin heading. The document that is best to look at is http://www.ti.com/lit/ug/spruhj1f/spruhj1f.pdf . It's a big document but does cover the software APIs. A lot of the stuff that has been developed we just don't need so there is some panning for gold. Can't blame them too much though as this is really not the market they are aiming for.
The part I am currently unpicking is regarding the difference between Instaspin-FOC and Instaspin-motion. In particular a chunk of marketing called 'spin-tac' which may contain some code blocks that are useful. Eventually I will get to the bottom of what code runs on what processor and what it does, but it's very much a long term research project as DRV8308 seems to offer most of what is needed in a cheapish EVM.
It is entirely possible that a coreless motor with high intertia platter offers more than any fancy control algorithm, but if we don't try we won't know.
- Status
- This old topic is closed. If you want to reopen this topic, contact a moderator using the "Report Post" button.
- Home
- Source & Line
- Analogue Source
- DD pancake motors