Has anyone any ideas on how to build a tube power supply to supply my Origin live dc motor with current. Currently i am using a LT1085 regulator set at 5v with good results. Brinkman makes such a device "Rönt" but i haven´t found much about this device, other than it uses 6BW4, EC360, 6111 tubes. Maybe it exists some even better solution that can make my heavily modified LP12 turntable sound even better.
Thanks,
Kenneth
Sweden
Thanks,
Kenneth
Sweden
As much as I love tubes and almost anyone here can attest to that..  I believe tubes are totally inappropriate for this particular application. I can almost understand their application in a high voltage sine source for a relatively low current synchronous or shaded pole induction motor, but for a low voltage relatively high current DC motor solid state is clearly the best way to go from many perspectives including raw performance.
I believe tubes are totally inappropriate for this particular application. I can almost understand their application in a high voltage sine source for a relatively low current synchronous or shaded pole induction motor, but for a low voltage relatively high current DC motor solid state is clearly the best way to go from many perspectives including raw performance.
What sort of improvement are you looking for? A quieter motor, more torque, better speed stability (IMHO a big problem with many DC motor set ups) or some other aetherial quality you subconsciously (perhaps) perceive your turntable lacks? These are some of the many reasons why I finally went out and bought and restored a Thorens TD-124 based on all of the hype.. Could it be that you have reached the end of the road with this TT? It does happen and perhaps you are ready to move up to something even better.. I have some experience in this matter having progressed through a series of progressively more modified AR-XA tables, to a Thorens TD-166 MKII (not a very bad table but not great either IMHO) to a TD-125 MKI better still, but which never really satisfied, to a rather expensive and unaffordable SME 20/2 which while amazing wasn't quite what I was looking for either although in fairness it was only the acquisition of the very "groovy" TD-124 that made that obvious. Just something to consider...
I am going to assume that your current supply is extremely stiff, and has both good short and long term stability. The only improvements you could make are probably to further isolate the motor from the table and damp any vibration it makes. Speed stability issues are something else again, and some have found the OL drives wanting in this department. (I have no direct experience with them, but have extensive experience with very badly designed dc servo-motor based belt drives which failed to please on many fronts.)
Hope this is at least a little helpful, and not too negative.
I believe tubes are totally inappropriate for this particular application. I can almost understand their application in a high voltage sine source for a relatively low current synchronous or shaded pole induction motor, but for a low voltage relatively high current DC motor solid state is clearly the best way to go from many perspectives including raw performance.What sort of improvement are you looking for? A quieter motor, more torque, better speed stability (IMHO a big problem with many DC motor set ups) or some other aetherial quality you subconsciously (perhaps) perceive your turntable lacks? These are some of the many reasons why I finally went out and bought and restored a Thorens TD-124 based on all of the hype.. Could it be that you have reached the end of the road with this TT? It does happen and perhaps you are ready to move up to something even better.. I have some experience in this matter having progressed through a series of progressively more modified AR-XA tables, to a Thorens TD-166 MKII (not a very bad table but not great either IMHO) to a TD-125 MKI better still, but which never really satisfied, to a rather expensive and unaffordable SME 20/2 which while amazing wasn't quite what I was looking for either although in fairness it was only the acquisition of the very "groovy" TD-124 that made that obvious. Just something to consider...
I am going to assume that your current supply is extremely stiff, and has both good short and long term stability. The only improvements you could make are probably to further isolate the motor from the table and damp any vibration it makes. Speed stability issues are something else again, and some have found the OL drives wanting in this department. (I have no direct experience with them, but have extensive experience with very badly designed dc servo-motor based belt drives which failed to please on many fronts.)
Hope this is at least a little helpful, and not too negative.
Last edited:
Speed stability
Yes! this was helpful. what i am searching is the best way to obtain speed stability. To my understanding the Origin live dc100 motor i am using of very high quality. Is a positive regulator the way to (LT1085) go? or do i need something more advanced. My Lp12 turntable has a subchassi and frame made of wooden honeycomb, which is imensly stiff. The tonearm is a Rega rb250 with Abec7 ballbearings, the cartridge is a Koetsu black. This setup works just fine.
Yes! this was helpful. what i am searching is the best way to obtain speed stability. To my understanding the Origin live dc100 motor i am using of very high quality. Is a positive regulator the way to (LT1085) go? or do i need something more advanced. My Lp12 turntable has a subchassi and frame made of wooden honeycomb, which is imensly stiff. The tonearm is a Rega rb250 with Abec7 ballbearings, the cartridge is a Koetsu black. This setup works just fine.
Yes! this was helpful. what i am searching is the best way to obtain speed stability. To my understanding the Origin live dc100 motor i am using of very high quality. Is a positive regulator the way to (LT1085) go? or do i need something more advanced. My Lp12 turntable has a subchassi and frame made of wooden honeycomb, which is imensly stiff. The tonearm is a Rega rb250 with Abec7 ballbearings, the cartridge is a Koetsu black. This setup works just fine.
Perhaps a step up to the DC200 would help address the issue you are having? Another thought would be some sort of active motor regulation based on sensing the motor's back EMF to main constant speed - also compensating for the changing winding resistance as the motor heats up. Are you using their basic controller? They have better ones that presumably do the sorts of things I mentioned previously. Alternately perhaps a good AC synchronous motor would be better? (This is the direction I would tend to go in - I prefer AC motors for their excellent speed stability without servo feedback and sophisticated control electronics.)
Sounds like you have done a lot of modification to this table. Lots of fun seeing how far you can take things..
Thorens TD-166 MKII (not a very bad table but not great either IMHO)
Hi Kevin,
What do you not like about TD166 MkII ? just curious
No i dont use any of their controlers. I bought the DC100 motor separatly and built my own controler. Thats why i am eager to find out if there are some better way to build a supply that can compensate to some of the limitations i have heard of. I read about some servo circuits that is used with these type of motors.
No i dont use any of their controlers. I bought the DC100 motor separatly and built my own controler. Thats why i am eager to find out if there are some better way to build a supply that can compensate to some of the limitations i have heard of. I read about some servo circuits that is used with these type of motors.
You'll need to sense back emf as a minimum in order to provide some level of speed regulation over time. Changes in load, ambient and motor temperature will all result in significant errors. I'd google dc motor control circuitry and see what you come up with. Perhaps even a simple constant current controller could be an improvement, but I'd try to sense the back emf instead - I vaguely remember a variation of a controller based on a simple wheatstone bridge inside a power op-amp feedback loop, the motor was part of one leg of the bridge but no longer remember the details unfortunately. There are probably a couple of motor controller chips currently in production (or obsolete) that you can buy from the likes of Allegro semiconductor, etc., that might do the job for you.
Edit: I located the original application note from Burr Brown I referenced above: http://www.ti.com/lit/an/sboa043/sboa043.pdf
This will be much better than running open loop.
For a more complex design that may perform better check this out: http://electronicdesign.com/article...rcuit-keeps-dc-motor-running-at-constant.aspx
Edit 7/2013: Refresh TI link
Last edited:
My Lp12 turntable has a subchassi and frame made of wooden honeycomb, which is imensly stiff. .
Do you have any pics? Thanks,
jeff
The link to the dc motor controller application note I referred to is actually here:http://www.ti.com/lit/an/sboa043/sboa043.pdf
To control speed you will need a precision voltage reference and a pot. It would be a good idea to buffer the pot with an op-amp so that varying pot settings do not affect the loop gain of the controller.
The math to figure out the control loop is relatively straight forward.. Let me know if you need help with the design side of this..
A bipolar supply is not strictly required but on a single positive supply a negative reference voltage is required so it seems more sensible to just use a simple bipolar supply. I expect +/-9V would be more than sufficient, and the current capability need not be symmetrical.
 Edit 7/2013: Refresh TI link
Edit 7/2013: Refresh TI link
To control speed you will need a precision voltage reference and a pot. It would be a good idea to buffer the pot with an op-amp so that varying pot settings do not affect the loop gain of the controller.
The math to figure out the control loop is relatively straight forward.. Let me know if you need help with the design side of this..
A bipolar supply is not strictly required but on a single positive supply a negative reference voltage is required so it seems more sensible to just use a simple bipolar supply. I expect +/-9V would be more than sufficient, and the current capability need not be symmetrical.
Edit 7/2013: Refresh TI link
Last edited:
Hi Kevin,
What do you not like about TD166 MkII ? just curious
It wasn't a particularly bad table, but was curiously uninteresting/uninvolving sounding, and not in the sense that I mean it was overly neutral and uncolored, more like blah... Rumble and platter resonances were issues that detracted from the overall performance, the arm is ok, and far worse exist. You've heard the expression: "Damning by faint praise" - I think this applies here, there's nothing terribly wrong per se, it just lacks the kind of resolution, and vanishingly low noise floor I look for. I think though for the sort of money they sell for they represent a good entry point for those just getting into vinyl.. FWIW performance is probably typical of better quality mass market tables from that time frame...
The math looks difficult. My DC100 motor runs at 3,9v to achive 33,33 and 5v for 45 evolutions per minut. The winding impedance is 30 ohm. Are the suggested 9v supply for the opamaps or the input (control) voltage. Thanks
The voltages I quoted are for the supplies.. You will need a separate reference which could very easily be derived from one of the supplies, I'd recommend an LM385-1.2V reference, a 10T pot for each speed, and a switch to select speed. The LM385 is a shunt reference and can be run off of the 9V supply using a series resistor..
Last edited:
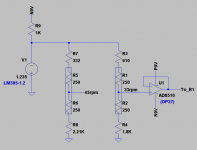
I've been thinking about your application and based on the application notes I recommend the following values for the basic controller circuit:
R1: 1.0K 1% 100ppm 1/4W
R2: 5.11K 1% 100ppm 1/4W
R3: Calculated value 851 ohms either use 845 1% 100ppm 1/4W or my preference would be 250 ohm 10T low TC pot, and 681 1% 100ppm 1/4W in series. This controls the speed regulation (see app note) set pot to ~170 ohms - decrease value slightly if motor does not maintain speed when load changes.
RS: 2.7 1% 100PPM 1/2W or greater..
RCL: 56.1K 1% (for OPA547) IL ~250mA
Power Op-amp: OPA547 in TO-220 package.
Buffer: OP27C
Reference: LM385-1.2V
Motor current under load is going to be modest, stalled 130mA - 170mA at 33rpm and 45rpm respectively.
The power supply needs to be able to furnish 250mA without sagging significantly. It does not necessarily need to be regulated as the reference will provide a stable reference voltage for the controller.
The reference should be run at ~10mA allowing for a couple of mA for the resistor dividers/pots. I'd restrict the adjustment range on the top and bottom end of each pot making it the center resistor in a 3 resistor divider.
The reference voltage fed to R1 should be buffered so that controller performance is not compromised by changes in closed loop gain as a function of speed setting. Strikes me that the OP27C would be a good choice for this application. The pot(s) should be 1K.
For 33.33rpm based on the numbers you provided the control voltage will be -763mV, and for 45rpm -978mV. The buffer at its simplest is a non-inverting unity gain configuration, given the high open loop gain and the moderate precision CM errors in non-inverting mode are not significant saving a couple of resistors.
Be sure to install 0.1uF decoupling capacitors at each supply pin of both the OPA547 and OP27.. The supply should be well filtered, but does not really need to be regulated - if you wish to carry this a step further LM7809 and LM7909 will get the job done cheaply and well.
http://focus.ti.com/lit/ds/symlink/opa547.pdf
http://focus.ti.com/docs/prod/folders/print/op27.html
http://www.national.com/ds/LM/LM185-1.2.pdf
Please download the datasheets for the recommended parts. Any questions just post.
The LM7809 and LM7909 are made by Fairchild and others, and are available from Digikey. (Under $1 each)
The OPA547 is stocked by Digikey and is $11.
The OP27GPZ (made by AD) is in stock at Digikey for $2.70
R1: 1.0K 1% 100ppm 1/4W
R2: 5.11K 1% 100ppm 1/4W
R3: Calculated value 851 ohms either use 845 1% 100ppm 1/4W or my preference would be 250 ohm 10T low TC pot, and 681 1% 100ppm 1/4W in series. This controls the speed regulation (see app note) set pot to ~170 ohms - decrease value slightly if motor does not maintain speed when load changes.
RS: 2.7 1% 100PPM 1/2W or greater..
RCL: 56.1K 1% (for OPA547) IL ~250mA
Power Op-amp: OPA547 in TO-220 package.
Buffer: OP27C
Reference: LM385-1.2V
Motor current under load is going to be modest, stalled 130mA - 170mA at 33rpm and 45rpm respectively.
The power supply needs to be able to furnish 250mA without sagging significantly. It does not necessarily need to be regulated as the reference will provide a stable reference voltage for the controller.
The reference should be run at ~10mA allowing for a couple of mA for the resistor dividers/pots. I'd restrict the adjustment range on the top and bottom end of each pot making it the center resistor in a 3 resistor divider.
The reference voltage fed to R1 should be buffered so that controller performance is not compromised by changes in closed loop gain as a function of speed setting. Strikes me that the OP27C would be a good choice for this application. The pot(s) should be 1K.
For 33.33rpm based on the numbers you provided the control voltage will be -763mV, and for 45rpm -978mV. The buffer at its simplest is a non-inverting unity gain configuration, given the high open loop gain and the moderate precision CM errors in non-inverting mode are not significant saving a couple of resistors.
Be sure to install 0.1uF decoupling capacitors at each supply pin of both the OPA547 and OP27.. The supply should be well filtered, but does not really need to be regulated - if you wish to carry this a step further LM7809 and LM7909 will get the job done cheaply and well.
http://focus.ti.com/lit/ds/symlink/opa547.pdf
http://focus.ti.com/docs/prod/folders/print/op27.html
http://www.national.com/ds/LM/LM185-1.2.pdf
Please download the datasheets for the recommended parts. Any questions just post.
The LM7809 and LM7909 are made by Fairchild and others, and are available from Digikey. (Under $1 each)
The OPA547 is stocked by Digikey and is $11.
The OP27GPZ (made by AD) is in stock at Digikey for $2.70
Last edited:
Reference, Voltage Divider Strings, Buffer
Hopefully this will help, and again the value of the resistors was based on the voltages you posted. Worst case you may be tweaking a few resistors to get enough adjustment range.
The 33 and 45 rpm pots would go to a switch, and you should probably add a 1M resistor at the input of the buffer op-amp to gnd to prevent bad behavior when switching from one speed to the other.. (Op-amp going to one rail or the other.)
Pots are 500 ohm, and should be low TC and relatively tight tolerance say 5%. All other resistors 1% 100ppm 1/4W
Hopefully this will help, and again the value of the resistors was based on the voltages you posted. Worst case you may be tweaking a few resistors to get enough adjustment range.
The 33 and 45 rpm pots would go to a switch, and you should probably add a 1M resistor at the input of the buffer op-amp to gnd to prevent bad behavior when switching from one speed to the other.. (Op-amp going to one rail or the other.)
Pots are 500 ohm, and should be low TC and relatively tight tolerance say 5%. All other resistors 1% 100ppm 1/4W
Attachments
Last edited:
Let me know how it turns out. This is the "quick and dirty" approach since I don't have the parts and motor on hand I figured it would just be simplest to stick closely to the application note which I think under the circumstances is the best route to success..
I expect it will be a very great deal better than running without any sort of control loop.
since I don't have the parts and motor on hand I figured it would just be simplest to stick closely to the application note which I think under the circumstances is the best route to success.. I expect it will be a very great deal better than running without any sort of control loop.
Hi Kenneth,
Any update on how the circuit turned out? I am building a new turntable and I am looking into DC motor along with a DC power supply and this thread is one of the most interesting i've found so far but I'd love to hear how the circuit turned out. And thanks Kevinkr for the explanations.
Any update on how the circuit turned out? I am building a new turntable and I am looking into DC motor along with a DC power supply and this thread is one of the most interesting i've found so far but I'd love to hear how the circuit turned out. And thanks Kevinkr for the explanations.
These are the problems it will have:
Firstly, being a pfb loop, it will amplify any current noise (such as commutation spikes) back into the circuit. The higher the loop gain (needed to get good accuracy) the worse this gets. To limit this, you can interpolate a low pass filter in the loop but slowing the loop slows the transient response. No free lunch.
The control loop tuning will not stay stable with temperature due to the positive TCR of the motor coils. This means that if the tuning is set to equalise motor impedance when the motor is cold it will sag when the motor gets warm, or if it set to equalise when the motor is warm it will oscillate when the motor is cold.
The set speed will drift with time and temperature and need to be reset frequently.
These are not problems with this particular circuit alone, they are endemic to the class of circuits.
Firstly, being a pfb loop, it will amplify any current noise (such as commutation spikes) back into the circuit. The higher the loop gain (needed to get good accuracy) the worse this gets. To limit this, you can interpolate a low pass filter in the loop but slowing the loop slows the transient response. No free lunch.
The control loop tuning will not stay stable with temperature due to the positive TCR of the motor coils. This means that if the tuning is set to equalise motor impedance when the motor is cold it will sag when the motor gets warm, or if it set to equalise when the motor is warm it will oscillate when the motor is cold.
The set speed will drift with time and temperature and need to be reset frequently.
These are not problems with this particular circuit alone, they are endemic to the class of circuits.
- Status
- This old topic is closed. If you want to reopen this topic, contact a moderator using the "Report Post" button.
- Home
- Source & Line
- Analogue Source
- Tube power supply for turntable