It's a commonly held opinion that a Hurst 300 RPM motor is an upgrade to the stock 600 RPM motor used on a lot of tables. The reasons most commonly cited are:
1. Higher torque
2. Lower vibration due to finer cogging as a result of 24 poles vs 12 poles.
1. While it is true that a 300 RPM motor will have twice the torque of a 600 RPM motor of the same power rating, the 300 RPM motor will require a pulley twice the size of a 600 RPM motor and have 1/2 the mechanical advantage, so the force (and therefore usable power) delivered to the platter, will be the same, assuming the same power rating in the motors. The downside of using the 300 RPM motor is the speed mismatch at power up between the pulley and platter will be greater than with a 600 RPM motor, so the "burn out" on the belt will be worse. It is analogous to trying to start a car moving from a dead stop by starting in 2nd gear (300 RPM) vs 1st gear (600 RPM).
2. Cogging is caused by the strong attraction between the permanent magnet rotor and the metal pole pieces and loss of attraction between the rotor and the air gaps between the poles as the rotor spins. The cogging feels "finer" in the 300 RPM motor when turned by hand because there are twice as many poles, but the motor spins at half the speed, so the frequency of the variable reluctance "cogs" will be the same: 5 revs/sec x 24 poles=120Hz for a 300 RPM motor and 10 revs/sec x 12 poles=120Hz for a 600 RPM motor.
Assuming the same strength of the PM rotors and the same clearance between rotor and poles, the strength of the cogging (and the amplitude of the vibrations) will be determined by the strength of the rotating field in the coils which is a function of the electrical power rating of the motor. A 300 RPM motor should have the same vibration signature as a 600 RPM motor of the same power rating.
I did some tests using an Analog Devices ADXL327 three axis accelerometer mounted directly to the ring on a VPI SAMA housing, using 3 Hurst motors: 5.5W 600 RPM, 7.5W 300 RPM and 10W 600 RPM . The tests were done with the motor firmly mounted in the housing, pulley installed (but no belt) and using the factory supplied (and recommended) phase cap. I even took care to place the SAMA at the same locaton on the bench which is 1½" maple butcher block. The ADXL327 is powered by 2 Lithium Ion batteries.
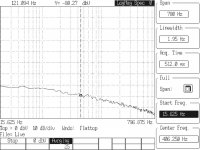
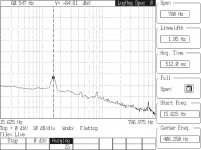
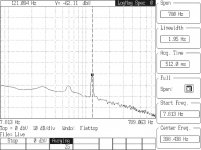
The first image below is the baseline reading: ADXL327 powered up and mounted on the motor housing with the motor off.
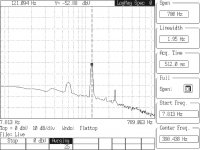
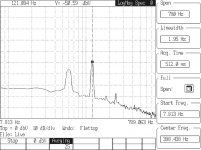
The second image is with a 5.5W 600 RPM motor with 0.5uFd phase cap. The primary response is at 120Hz as expected and the level of vibration is -52dB or 28 dB higher than baseline.
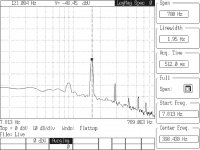
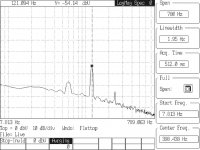
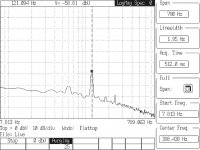
The third image is with a 7.5W 300 RPM motor with 0.68uFd phase cap. The primary response is also at 120Hz and the level of vibration is -48dB or 32dB higher than baseline and 4dB higher than the 600 RPM 5.5W motor.
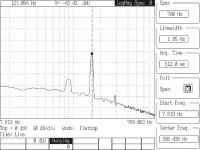
The fourth image is with a 10W 600 RPM motor and 0.82uFd phase cap. The primary response is 120Hz at -43dB, 37dB higher than baseline and 5dB higher than the 7.5W motor.
The last image is a 12W 600 RPM BLDC motor driven by a 3 phase sinewave supply at 20Hz. The response at 60Hz was there with the supply on and off so I assume it is being induced into the wiring. The primary vibration from cogging would be at 10 revs/sec x 4 poles=40Hz and appears to be the same level as the baseline reading.
I don't have a dual motor assembly to test, but if the trend follows, the two 7.5W 300 RPM motors (15W) should have more vibration than the 10W 600 RPM motor. It is difficult to see why people consider the 300 RPM motors an upgrade from the 5.5W 600 RPM stock motor. The downside is the 300 RPM motors have higher vibration (as they are higher power) and cause more burn out on the belt. I don't see an upside.
1. Higher torque
2. Lower vibration due to finer cogging as a result of 24 poles vs 12 poles.
1. While it is true that a 300 RPM motor will have twice the torque of a 600 RPM motor of the same power rating, the 300 RPM motor will require a pulley twice the size of a 600 RPM motor and have 1/2 the mechanical advantage, so the force (and therefore usable power) delivered to the platter, will be the same, assuming the same power rating in the motors. The downside of using the 300 RPM motor is the speed mismatch at power up between the pulley and platter will be greater than with a 600 RPM motor, so the "burn out" on the belt will be worse. It is analogous to trying to start a car moving from a dead stop by starting in 2nd gear (300 RPM) vs 1st gear (600 RPM).
2. Cogging is caused by the strong attraction between the permanent magnet rotor and the metal pole pieces and loss of attraction between the rotor and the air gaps between the poles as the rotor spins. The cogging feels "finer" in the 300 RPM motor when turned by hand because there are twice as many poles, but the motor spins at half the speed, so the frequency of the variable reluctance "cogs" will be the same: 5 revs/sec x 24 poles=120Hz for a 300 RPM motor and 10 revs/sec x 12 poles=120Hz for a 600 RPM motor.
Assuming the same strength of the PM rotors and the same clearance between rotor and poles, the strength of the cogging (and the amplitude of the vibrations) will be determined by the strength of the rotating field in the coils which is a function of the electrical power rating of the motor. A 300 RPM motor should have the same vibration signature as a 600 RPM motor of the same power rating.
I did some tests using an Analog Devices ADXL327 three axis accelerometer mounted directly to the ring on a VPI SAMA housing, using 3 Hurst motors: 5.5W 600 RPM, 7.5W 300 RPM and 10W 600 RPM . The tests were done with the motor firmly mounted in the housing, pulley installed (but no belt) and using the factory supplied (and recommended) phase cap. I even took care to place the SAMA at the same locaton on the bench which is 1½" maple butcher block. The ADXL327 is powered by 2 Lithium Ion batteries.
The first image below is the baseline reading: ADXL327 powered up and mounted on the motor housing with the motor off.
The second image is with a 5.5W 600 RPM motor with 0.5uFd phase cap. The primary response is at 120Hz as expected and the level of vibration is -52dB or 28 dB higher than baseline.
The third image is with a 7.5W 300 RPM motor with 0.68uFd phase cap. The primary response is also at 120Hz and the level of vibration is -48dB or 32dB higher than baseline and 4dB higher than the 600 RPM 5.5W motor.
The fourth image is with a 10W 600 RPM motor and 0.82uFd phase cap. The primary response is 120Hz at -43dB, 37dB higher than baseline and 5dB higher than the 7.5W motor.
The last image is a 12W 600 RPM BLDC motor driven by a 3 phase sinewave supply at 20Hz. The response at 60Hz was there with the supply on and off so I assume it is being induced into the wiring. The primary vibration from cogging would be at 10 revs/sec x 4 poles=40Hz and appears to be the same level as the baseline reading.
I don't have a dual motor assembly to test, but if the trend follows, the two 7.5W 300 RPM motors (15W) should have more vibration than the 10W 600 RPM motor. It is difficult to see why people consider the 300 RPM motors an upgrade from the 5.5W 600 RPM stock motor. The downside is the 300 RPM motors have higher vibration (as they are higher power) and cause more burn out on the belt. I don't see an upside.
Attachments


1. While it is true that a 300 RPM motor will have twice the torque of a 600 RPM motor of the same power rating, the 300 RPM motor will require a pulley twice the size of a 600 RPM motor
I do like the fact that it has a bigger pulley and probably less slippage?
I use a direct drive table to drive a passive platter so that's about as big a motor and pulley as you can get!
It is difficult to see why people consider the 300 RPM motors an upgrade from the 5.5W 600 RPM stock motor. The downside is the 300 RPM motors have higher vibration (as they are higher power) and cause more burn out on the belt. I don't see an upside.
Because 'people' is more often than not more synonymous with 'idiots' than it is 'engineers' and as such 'people' likely lap up any ******** they are told my manufacturers and magazines without investigating the facts...
Nice bit of work, good to see the numbers to back up the facts.
Interesting, I wonder though what the difference (if any) would be with the motors loaded and interacting with the drive belt. (Is that something you can do fairly easily?)
I always understood the argument to have more to do with torque ripple which purportedly is lower in 300rpm 24 pole motors than 600rpm 12 pole motors. It could well be more audiophile myth.
I always understood the argument to have more to do with torque ripple which purportedly is lower in 300rpm 24 pole motors than 600rpm 12 pole motors. It could well be more audiophile myth.
Interesting, I wonder though what the difference (if any) would be with the motors loaded and interacting with the drive belt. (Is that something you can do fairly easily?)
I haven't measured the vibrations at the motor with the belt connected to a platter, but it could be done fairly easily. I would guess the vibrations would increase as you are putting a load on the motor (and demanding more torque from it). I wanted to measure the source of vibrations in this case as the goal of using a belt is to isolate the motor from the platter. It might be more valid to measure the vibrations at the plinth in that case, but they will undoubtedly be attenuated quite a bit. You also introduce a lot of variables to control (belt tension and condition, bearing, platter, tonearm, cartridge etc.).
I posted this data on VPI's website and the thread was subsequently locked after Harry went all Chernobyl over it. Someone suggested that the 300 RPM motor is better because the pulley rotates at 5Hz (revs/sec) rather than 10Hz (on a 600 RPM) motor, the theory being that the 600 RPM motor might excite the tonearm into resonance easier. This would only be true if the pulley was eccentric, the motor shaft is bent or the rotor is unbalanced (the latter being a very real possibility with these motors). It also assumes the tonearm resonance is at 10Hz and not 7Hz.
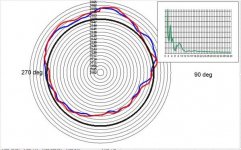
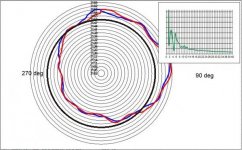
Below are two plots of the same table/arm/cartridge combo; the first is driven by a 300 RPM 7.5W motor with a VPI factory pulley. There is a peak in the response at ~3Hz and also at ~5.5Hz, which could be the interaction of the pulley and tonearm. The second plot is with a 600 RPM 5.5W motor and VPI factory pulley. There is still a response at ~3Hz, but the upper response moved to ~9.5Hz, which again could be pulley/tonearm resonance. The level of the tonearm response is much lower with the 600 RPM motor vs the 300 RPM.
I always understood the argument to have more to do with torque ripple which purportedly is lower in 300rpm 24 pole motors than 600rpm 12 pole motors. It could well be more audiophile myth.
I thought torque ripple is synonymous with cogging? If they're not exactly the same, I think the result (vibration) would be.
Attachments
Last edited:
I would say larger pulley is a plus for string and tape drive. Maybe rubber not as much. I do not remember much difference when I used various Hurst motors. Now larger motors and large platters (regardless of some extra noise) now we are talking some meat on the bones. (40-50 watt and 30 to 40 lbs)
As far as VPI they change their minds let's say on a regular basis. Pretty hard to say downgrade from a marketing perspective. Nice information Bill you always go the extra mile. Now what would be really cool is a rpm guage used for testing 5 figures out even if multiple sensors etc. That would be nice to have for testing motors, belts, platters, etc. If anyone could pull it off I would put my money on you. Of course no real market demand just its cool and I did it.
Enjoy the ride
Tom
As far as VPI they change their minds let's say on a regular basis. Pretty hard to say downgrade from a marketing perspective. Nice information Bill you always go the extra mile. Now what would be really cool is a rpm guage used for testing 5 figures out even if multiple sensors etc. That would be nice to have for testing motors, belts, platters, etc. If anyone could pull it off I would put my money on you. Of course no real market demand just its cool and I did it.
Enjoy the ride
Tom
I do like the fact that it has a bigger pulley and probably less slippage?
I use a direct drive table to drive a passive platter so that's about as big a motor and pulley as you can get!
Slippage should not be a problem, except at start up. If it is after that, it can be cured with proper tension.
Belt creep is always more of a problem than slippage; I don't think pulley diameter has much of an effect on it, but adding belts would, which requires a non-tapered pulley.
Pyramid, You wouldn't happen to also have a premotec motor to add to this test? I, as well as hopefully others, would be curious as to where it falls. Being 300rpm it would use the larger pulley but its very low torque.
This is a 16V 300 RPM Premotec motor with 8.2uFd phase cap. I had to mount it in a solid wooden frame or the vibration was much higher.
The main response is -55dB at 120Hz, quieter than the 5.5W Hurst as you would expect since it is less than half the power.
The response at 60Hz is absent; they probably secure the windings better than Hurst, which in their motors, basically "float" within the metal pole pieces. There are also responses at 240Hz and 480Hz which seems to mirror the Hurst 300 RPM motors, but are not present (or to a lesser degree) in the 600 RPM motors.
Attachments

noob here please be gentle.
Wouldn't Platter inertia somewhat overcome cogging/vibration ? kind of like platter driving the pulley. if yes, what if this platter force has significant effect on 300rpm motor rather then 600 rpm ?
Regards.
Yes, platter inertia would smooth out speed variations of the platter, but the vibrations can still be conducted through the belt or through the plinth and still be picked up by the stylus. The accelerometer is measuring the lateral vibrations in the motor housing.
In a solid uniform density disk like the platter, rotational inertia is m*r²/2 where m is mass and r is the radius of the disc, so the inertia will be the same regardless of speed. The vibration is occurring at 120Hz regardless of speed, so I would imagine the result would be the same at either speed.
Last edited:
Very nice indeed! Can we assume the measurements were done in a steady state condition- after a few dozen or so revolutions?
Yes, the motor has been running for several minutes typically and 25x averaging is applied to the display to smooth out any sudden changes.
Interesting, I wonder though what the difference (if any) would be with the motors loaded and interacting with the drive belt. (Is that something you can do fairly easily?)
I measured just the 5.5W 600 RPM and 7.5W 300 RPM motor when connected to the platter of a VPI Scout via a single factory belt. Surprisingly, both motors did quiet down ~3dB when measured at the motor housing.
I also measured the vibrations at the plinth for both motors and they showed similar reductions, but not as much as I would have expected. (~7-8dB attenuation).
I also noticed that the higher frequency vibrations (harmonics?) of the 120Hz fundamental were reduced in the 300 RPM motor when connected to the platter and belt.
The first 2 slides are the 600 RPM 5.5W motor measured at the motor housing (slide 1) and at the plinth (slide 2).
The last 2 slides are the 300 RPM 7.5W motor measured at the motor housing (slide 3) and at the plinth (slide 4).
Attachments
Definitely some interesting measurements here. Thank you. I guess the question now is: What can we do about it?
I'm currently in a quandary about what to do with my own rig, which I use for transcribing vinyl to digital. I previously used a Michell TecnoDec, which uses a DC motor, and have since moved to a VPI Scout Jr (600RPM 5.5W AC motor). I quickly noticed a difference in the noise floor between the Michell and the VPI: Where the Michell was always dead quiet, there was noticeable (mechanical) hum with the VPI. The Michell's DC motor is so damned quiet that I took it for granted. On the flip side, speed control is far easier with the VPI using an external speed controller, as opposed to having to open up the Michell power supply while plugged in and turn a potentiometer with a small, non-conductive screwdriver. Speed measurement is also much easier with a VPI since there's room under the platter to place a sensor for a tachometer, which just isn't workable with the tiny plinth/platter gap on the TecnoDec specifically.
I improved the hum issues by using Herbie's thin grungebuster material to damp the ringing of the motor pod assembly (tap the side plate with your finger, it rings like a bell), and removed the stock feet in favor of thick Herbie's grungebuster dots. The noise floor is still audibly higher than the TecnoDec, but it's greatly improved, and it doesn't require graphing to notice the difference.
Other things that I attempted that made things worse in my case were a silk thread belt (I'd read reports of it being a huge improvement, but I found it to transmit more vibration to the platter than the rubber belt), and a small snack back filled with playground sand to mass-load the motor pod (this just changed the sound, and for the worse, though other mass-loading/damping options might work better).
So while veering a little bit off of the original topic, the question is closely related: What else can be done to address the vibration issues measured here, without sacrificing reliability?
I'm currently in a quandary about what to do with my own rig, which I use for transcribing vinyl to digital. I previously used a Michell TecnoDec, which uses a DC motor, and have since moved to a VPI Scout Jr (600RPM 5.5W AC motor). I quickly noticed a difference in the noise floor between the Michell and the VPI: Where the Michell was always dead quiet, there was noticeable (mechanical) hum with the VPI. The Michell's DC motor is so damned quiet that I took it for granted. On the flip side, speed control is far easier with the VPI using an external speed controller, as opposed to having to open up the Michell power supply while plugged in and turn a potentiometer with a small, non-conductive screwdriver. Speed measurement is also much easier with a VPI since there's room under the platter to place a sensor for a tachometer, which just isn't workable with the tiny plinth/platter gap on the TecnoDec specifically.
I improved the hum issues by using Herbie's thin grungebuster material to damp the ringing of the motor pod assembly (tap the side plate with your finger, it rings like a bell), and removed the stock feet in favor of thick Herbie's grungebuster dots. The noise floor is still audibly higher than the TecnoDec, but it's greatly improved, and it doesn't require graphing to notice the difference.
Other things that I attempted that made things worse in my case were a silk thread belt (I'd read reports of it being a huge improvement, but I found it to transmit more vibration to the platter than the rubber belt), and a small snack back filled with playground sand to mass-load the motor pod (this just changed the sound, and for the worse, though other mass-loading/damping options might work better).
So while veering a little bit off of the original topic, the question is closely related: What else can be done to address the vibration issues measured here, without sacrificing reliability?
Last edited:
And fair disclosure of my own facepalmer: I have not yet messed with the Voltage Output Mode on my Falcon. Duh. I'll be sure to adjust it to 85V (default is 100V) once I've gotten my phono preamp back and done a recording to verify the improvements made to that first. 
That said, it's kind of a good thing that I forgot about this mode, as it helped me to better detect and address vibration-related issues with the stock setup.
That said, it's kind of a good thing that I forgot about this mode, as it helped me to better detect and address vibration-related issues with the stock setup.
So while veering a little bit off of the original topic, the question is closely related: What else can be done to address the vibration issues measured here, without sacrificing reliability?
You covered it fairly well: DC motors in general are quieter, but more difficult to control the speed accurately and consistently. AC synch motors are easier for speed control, but can be noisier.
Look at the BLDC motor solution. The BLWS series bolts right into the SAMA housing of a VPI Scout. The motors are as quiet (if not quieter) than DC, yet they are synchronous, so they are easy to control. They have the wide speed range of DC motors, but with more torque and the bearings are not prone to wear like friction bearings. It's a tough combination to beat.
Yeah, I did notice that thread. Still outside of my skill level/comfort zone, sadly. Maybe some day I'll find some trade school classes to get me confident enough to even attempt part of that. :/
I'm curious if the damping solution I found might help with those BLDC motors as well, or if their vibration level of those is so low that the damping doesn't make a noticeable difference. I'm also certainly curious what other damping options might further improve the noise floor even with the Hurst motor, for those of us that are still solder-phobic.
I'm curious if the damping solution I found might help with those BLDC motors as well, or if their vibration level of those is so low that the damping doesn't make a noticeable difference. I'm also certainly curious what other damping options might further improve the noise floor even with the Hurst motor, for those of us that are still solder-phobic.
- Home
- Source & Line
- Analogue Source
- Hurst Motors: 300 RPM vs 600 RPM--Upgrade or Myth?