I decided to open up a new thread for this project. It originally started on a different topic so in order to give it a clear cut, I have generated this new post.
The goal for this project, is to create a top quality RIM drive system based on Maxon DC motor powered up by Linear Supply and controlled by a high precision digital tachometer, that can work with many different model of TTs on the market.
Intent is to create a final assembly and release BOM, schematic so that everybody can manufacture a copy to their will.
I have had email correspondence and spoken with Maxon Motors and have chosen a couple of candidates which are top quality but yet at a reasonable price.
The elected motors are:
1) A-max 26 Ø26 mm, Precious Metal Brushes CLL, 7 Watt
2) DCX 22 L Ø22 mm, Precious Metal Brushes, sleeve bearings
They both come in a variety of different windings so there is possibility to drive them at low speed without using gear heads with reasonably low supply voltage.
I tend to favor the second a bit as it seems more efficient. The lower impedance will allow an easier drive and to get as much torque out as possible.
Also the torque on the second is much higher and might suit better different situations, where more torque constant is needed to maintain proper speed.
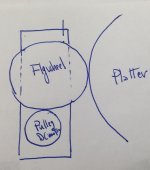
I have sketched an initial idea here, please feel free to comment on it.
The first idea I had was to utilize 3 motors in a triangular shape to drive the flywheel, but the problem of synchronization was brought up and it might require some big effort to perfect and figure out that might be too difficult to overcome unless it become a full time job kind of a thing.
Therefore I folded back on the one motor idea and then re-added the flywheel because I think it can bring a good improvement on both noise and speed stability.
Obviously if somebody will shed some light on the multi-motor drive system, we can always go back to a 2 / 3 motor scheme.
As far as work team is concerned, we have this group of people:
Stefano HW designer
Pyramid SW designer
Mechanical designer TBD
We had on the other post, two offers to help on the mechanical side, but it was never confirmed when asked. I am asking to the people who offered to help, to eventually confirm their commitment if they can.
Also, if anybody with capabilities and experience can step in is more than welcome. Obviously the wider the team the faster and more efficient the work will go.
Moreover, before committing to start a new HW and SW development, we would like to confirm and discuss the concept design and refine it upfront. For this we need help of people who have experience on driving system for TTs and want to get here for the community the best design.
When we get a general consensus and confident that the concept design is what we want, then we will start spinning a prototype and get all the parts needed to create the physical model.
I hope this will be of interest to many of you and that can become an interesting project. Please let's see how many people are interested and want to be in this project....please post your interest here")
Cheer!
The goal for this project, is to create a top quality RIM drive system based on Maxon DC motor powered up by Linear Supply and controlled by a high precision digital tachometer, that can work with many different model of TTs on the market.
Intent is to create a final assembly and release BOM, schematic so that everybody can manufacture a copy to their will.
I have had email correspondence and spoken with Maxon Motors and have chosen a couple of candidates which are top quality but yet at a reasonable price.
The elected motors are:
1) A-max 26 Ø26 mm, Precious Metal Brushes CLL, 7 Watt
2) DCX 22 L Ø22 mm, Precious Metal Brushes, sleeve bearings
They both come in a variety of different windings so there is possibility to drive them at low speed without using gear heads with reasonably low supply voltage.
I tend to favor the second a bit as it seems more efficient. The lower impedance will allow an easier drive and to get as much torque out as possible.
Also the torque on the second is much higher and might suit better different situations, where more torque constant is needed to maintain proper speed.
I have sketched an initial idea here, please feel free to comment on it.
The first idea I had was to utilize 3 motors in a triangular shape to drive the flywheel, but the problem of synchronization was brought up and it might require some big effort to perfect and figure out that might be too difficult to overcome unless it become a full time job kind of a thing.
Therefore I folded back on the one motor idea and then re-added the flywheel because I think it can bring a good improvement on both noise and speed stability.
Obviously if somebody will shed some light on the multi-motor drive system, we can always go back to a 2 / 3 motor scheme.
As far as work team is concerned, we have this group of people:
Stefano HW designer
Pyramid SW designer
Mechanical designer TBD
We had on the other post, two offers to help on the mechanical side, but it was never confirmed when asked. I am asking to the people who offered to help, to eventually confirm their commitment if they can.
Also, if anybody with capabilities and experience can step in is more than welcome. Obviously the wider the team the faster and more efficient the work will go.
Moreover, before committing to start a new HW and SW development, we would like to confirm and discuss the concept design and refine it upfront. For this we need help of people who have experience on driving system for TTs and want to get here for the community the best design.
When we get a general consensus and confident that the concept design is what we want, then we will start spinning a prototype and get all the parts needed to create the physical model.
I hope this will be of interest to many of you and that can become an interesting project. Please let's see how many people are interested and want to be in this project....please post your interest here
Cheer!
Attachments
Last edited:
Stefano,
Do you think we should take a harder look at DC Brushless (or more accurately AC polyphase)? If the Maxon DC motors are not inexpensive, and the solution is intended to be more "ultimate", we might want to skip ahead to DC Brushless as it might be the more final solution. This may depend on costs and complexity of sinusoidal drive. You guys with the Electrical Engineering backgrounds will need to decide.
I like the diagram. I haven't looked at these motors but if they want to run at higher rpm's we might need the pulley for changing the mechanical advantage of the motor.
Jamie
Do you think we should take a harder look at DC Brushless (or more accurately AC polyphase)? If the Maxon DC motors are not inexpensive, and the solution is intended to be more "ultimate", we might want to skip ahead to DC Brushless as it might be the more final solution. This may depend on costs and complexity of sinusoidal drive. You guys with the Electrical Engineering backgrounds will need to decide.
I like the diagram. I haven't looked at these motors but if they want to run at higher rpm's we might need the pulley for changing the mechanical advantage of the motor.
Jamie
ok thanks guys for the participation. Let's talk about this for a second.
What would the advantage of having an AC polyphase motor be vs a brushed DC motor? more durable? If so, the DC motor by Maxon are rated 20000 hour of use, which is more than a lifetime for a TT IMHO.
Yes, this has to be a top approach, so I am not stuck with DC motors as long as we have benefits by using other types.
As far as I know speaking with Maxon, Kronos uses DC motor from them (although he didn’t tell me the exact part number, he led me to believe it is on the A-max series), also he mentioned that a new very high end TT ($100K range) will use one of the Maxon DC with ball bearing (preloaded).
The sleeves are a bit less durable than ball bearings, but they are also a bit quieter. I think the rating of the motor would be long enough for anyone to enjoy it for many years and when moment comes it can be replaced as the price for the motor is affordable.
Now if we have noise and torque benefit by going with another type of motor I am on for it. I have also asked the guy from Maxon about speed stability and he said that he is not aware of any problem regarding speed stability but he would personally implement a current feedback to compensate for constant torque.
But my question is: if the brushless is just a poly-phase AC motor, then why wouldn’t we use directly a better AC motor? I am not clear what is the difference in terms of noise would be, but as far as I am concerned the DC brushed motor has big advantage in terms of noise over all type of motors, which would make them then, a good candidate for RIM drive application.
Please let me know your thoughts.
What would the advantage of having an AC polyphase motor be vs a brushed DC motor? more durable? If so, the DC motor by Maxon are rated 20000 hour of use, which is more than a lifetime for a TT IMHO.
Yes, this has to be a top approach, so I am not stuck with DC motors as long as we have benefits by using other types.
As far as I know speaking with Maxon, Kronos uses DC motor from them (although he didn’t tell me the exact part number, he led me to believe it is on the A-max series), also he mentioned that a new very high end TT ($100K range) will use one of the Maxon DC with ball bearing (preloaded).
The sleeves are a bit less durable than ball bearings, but they are also a bit quieter. I think the rating of the motor would be long enough for anyone to enjoy it for many years and when moment comes it can be replaced as the price for the motor is affordable.
Now if we have noise and torque benefit by going with another type of motor I am on for it. I have also asked the guy from Maxon about speed stability and he said that he is not aware of any problem regarding speed stability but he would personally implement a current feedback to compensate for constant torque.
But my question is: if the brushless is just a poly-phase AC motor, then why wouldn’t we use directly a better AC motor? I am not clear what is the difference in terms of noise would be, but as far as I am concerned the DC brushed motor has big advantage in terms of noise over all type of motors, which would make them then, a good candidate for RIM drive application.
Please let me know your thoughts.
I like the idea of having the idler wheel or "flywheel" in your picture on the outer rim. It remind me of the D&R turntable from the vintage era. Most idler drive tables typically have the idler wheel underneath the platter and driving the inner rim or the underbelly of the platter like Lenco. Having a motor/wheel island independent of the plinth is a good idea. Flexible and can be use to drive other passive platters. The belt drive motor island is popular and it would nice to see some aftermarket idler island for consumers who wants a different flavor, provided the speed is adjustable, of course. The VPI style using two motors belt-driving a flywheel is NOT what I am talking. Anyway, if these motor pods become popular we don't have to resort to using vintage turntables all the time as Garrard 301 or Thorens TD-124 prices are off the roof.


An externally hosted image should be here but it was not working when we last tested it.
{kind=link}
Hi,
FWIW if you build a negative impedance power supply equal to
the DC motors winding resistance, then effectively the speed
will directly relate to to the applied voltage and back emf.
Flywheels stuck on top of motors tend to be more for show
than effect, unless they really have more inertia than the
motors armature, most don't. That is for belt drives.
Best place for a big flywheel is under the motor.
For direct idler drives they are utterly pointless, they
will have no effect compared to the platters inertia.
rgds, sreten.
FWIW if you build a negative impedance power supply equal to
the DC motors winding resistance, then effectively the speed
will directly relate to to the applied voltage and back emf.
Flywheels stuck on top of motors tend to be more for show
than effect, unless they really have more inertia than the
motors armature, most don't. That is for belt drives.
Best place for a big flywheel is under the motor.
For direct idler drives they are utterly pointless, they
will have no effect compared to the platters inertia.
rgds, sreten.
Last edited:
I like the idea of having the idler wheel or "flywheel" in your picture on the outer rim. It remind me of the D&R turntable from the vintage era. Most idler drive tables typically have the idler wheel underneath the platter and driving the inner rim or the underbelly of the platter like Lenco. Having a motor/wheel island independent of the plinth is a good idea. Flexible and can be use to drive other passive platters. The belt drive motor island is popular and it would nice to see some aftermarket idler island for consumers who wants a different flavor, provided the speed is adjustable, of course. The VPI style using two motors belt-driving a flywheel is NOT what I am talking. Anyway, if these motor pods become popular we don't have to resort to using vintage turntables all the time as Garrard 301 or Thorens TD-124 prices are off the roof.
An externally hosted image should be here but it was not working when we last tested it.
Thank you so much, I am glad you like my idea. You are an expert on TT design and if you like the idea it means a lot to me.
Sreten also had a good observation, what do you think about that?
Yes, the basic idea was to have an independent pad that would adapt to many tables (which means the wheel will have to come out a little more to allow users with TT on a frame to be able to utilize it), that way people won't need to buy vintage table anymore unless they really want to have a piece of vintage on their collection
The flywheel, in my original idea, wasn't only for added inertia, which of course the platter will have more then the flywheel, but I feel it will still add some and if flywheel is reasonably heavy the effect will be even more meaningful, but also and especially it will dampen any residual noise coming from the motor away from the stylus and the heavier the more dampening it will have.
Please you guys with a high experience on TT design feel free to comment and adjust my initial idea if needed so that perhaps we can move forward and start the mechanical design of the pod.
also, is a DC motor then a good solution for everybody?
new thread
Stefanoo,
Found this new thread, still willing to help produce parts for the prototype, I do not know how much help I will be in design though.
As for BLDC motors, or poly-phase AC motors, my experience has been with industrial servo systems 5KW and above. It is hard to tell how loud the motor is, but the noise from the inverter can be quite loud mostly the carrier frequency for the PWM. When a servo system is tuned with the speed response to high it will ring very loud.
I did find this: https://estore.ti.com/drv8312-69m-kit.aspx
I did not find any specs for the motor though.
I was going to purchase it to see how loud the motor itself is.
Thanks,
Ted
Stefanoo,
Found this new thread, still willing to help produce parts for the prototype, I do not know how much help I will be in design though.
As for BLDC motors, or poly-phase AC motors, my experience has been with industrial servo systems 5KW and above. It is hard to tell how loud the motor is, but the noise from the inverter can be quite loud mostly the carrier frequency for the PWM. When a servo system is tuned with the speed response to high it will ring very loud.
I did find this: https://estore.ti.com/drv8312-69m-kit.aspx
I did not find any specs for the motor though.
I was going to purchase it to see how loud the motor itself is.
Thanks,
Ted
Ted,
thank you very much for your support. Then perfect you and Jamie can help with production of prototype mechanical parts and mechanical drawing from when we will release.
AS far as electrical noise, DC motor is perfect if driven by a Linear very low noise supply. No PWM as you said it will be way too noisy.
thank you very much for your support. Then perfect you and Jamie can help with production of prototype mechanical parts and mechanical drawing from when we will release.
AS far as electrical noise, DC motor is perfect if driven by a Linear very low noise supply. No PWM as you said it will be way too noisy.
Stefano,
As I understand it the choice between DC and Brushless DC (AC Polyphase) is primarily about speed control. A DC motor or AC Synchronous motors are essentially dumb devices, they do not know how fast they are going or where they are located. Speed encoders, position encoders, torque measurement etc. can all be added externally and controlled for, but even then some of that control is very indirect. You are trying to do something with voltage to effect torque to effect speed in a DC motor, this is a very loose hold on speed and you are trusting inertia and other things to smooth out the dynamic changes in speed.
A DC Brushless motor typically includes some "intelligence" in the motor itself. Circuitry is provided where your controller can read a signal from the motor regarding speed. The motor is essentially designed to give controllers more to work with. Now, read back through Pyramid's post though where he says the Hall effect still isn't good enough for very precise speed control and we can do even better by using some of the features of the BLDC motor for speed control.
An AC Synchronous motor and a BLDC are nothing like each other and I don't understand your suggestion to just do AC instead of BLDC. That's like saying direct drive is just like rim drive, so why don't we just do direct drive. Totally different animals.
Due to costs, complexity and other considerations, DC may be the best choice, but I think it is really just about what people are familiar with and not based on any engineering fundamentals. That's fine, but lets be accurate in the reason for the choice. If you want DC, let's do DC.
Jamie
As I understand it the choice between DC and Brushless DC (AC Polyphase) is primarily about speed control. A DC motor or AC Synchronous motors are essentially dumb devices, they do not know how fast they are going or where they are located. Speed encoders, position encoders, torque measurement etc. can all be added externally and controlled for, but even then some of that control is very indirect. You are trying to do something with voltage to effect torque to effect speed in a DC motor, this is a very loose hold on speed and you are trusting inertia and other things to smooth out the dynamic changes in speed.
A DC Brushless motor typically includes some "intelligence" in the motor itself. Circuitry is provided where your controller can read a signal from the motor regarding speed. The motor is essentially designed to give controllers more to work with. Now, read back through Pyramid's post though where he says the Hall effect still isn't good enough for very precise speed control and we can do even better by using some of the features of the BLDC motor for speed control.
An AC Synchronous motor and a BLDC are nothing like each other and I don't understand your suggestion to just do AC instead of BLDC. That's like saying direct drive is just like rim drive, so why don't we just do direct drive. Totally different animals.
Due to costs, complexity and other considerations, DC may be the best choice, but I think it is really just about what people are familiar with and not based on any engineering fundamentals. That's fine, but lets be accurate in the reason for the choice. If you want DC, let's do DC.
Jamie
Jamie,
thanks for your post. No, I don't necessary want to go DC, so if there is a better solution I will design around it no problem.
Unfortunately there are 2 problems with BLDC motors:
1) Pyramid has it on his future linecart, therefore I don't think he will do it here for the community, but maybe I am wrong and therefore we won't have SW support.
2)They are not developed for hi-end application and we might going to venture on something that doesn't have very applicable specification for the type of application which in this case is low noise audio. These type of motors are more for industrial application where low level noise is definitely not a concern.
I personally feel strong about DC motor with tachometer. the precision I see achieved on my VPI with the AC motor and the tach is better than 0.3% and this is with belt (which is what I measure with my KAB strobe) therefore the precision you can achieve with tachometer is way more than what anybody really needs.
It is true however that on that system some feedback is applied, but this to show that tachometer system can really achieve very high precision speed control.
The only different with encoders is that you only can measure max of once every revolution, while an encoder will offer you position on various points of the circumference.
However correcting for this high degree of precision, will imply high level of feedback and personally I think this might be more of a negative for the final sound than anything else.
Now let's go over RIM vs Direct. Can you explain further by let's skip RIM drive and go to the Direct which is another animal.
Are you referring to the possibility of having a motor in direct contact with the spindle of your platter thus powering it up directly?
If so, that would go out of the scope of creating a universal device for more people, but rather be a re-design for a new TT.
Is that what you meant?
If not, please explain further.
thanks for your post. No, I don't necessary want to go DC, so if there is a better solution I will design around it no problem.
Unfortunately there are 2 problems with BLDC motors:
1) Pyramid has it on his future linecart, therefore I don't think he will do it here for the community, but maybe I am wrong and therefore we won't have SW support.
2)They are not developed for hi-end application and we might going to venture on something that doesn't have very applicable specification for the type of application which in this case is low noise audio. These type of motors are more for industrial application where low level noise is definitely not a concern.
I personally feel strong about DC motor with tachometer. the precision I see achieved on my VPI with the AC motor and the tach is better than 0.3% and this is with belt (which is what I measure with my KAB strobe) therefore the precision you can achieve with tachometer is way more than what anybody really needs.
It is true however that on that system some feedback is applied, but this to show that tachometer system can really achieve very high precision speed control.
The only different with encoders is that you only can measure max of once every revolution, while an encoder will offer you position on various points of the circumference.
However correcting for this high degree of precision, will imply high level of feedback and personally I think this might be more of a negative for the final sound than anything else.
Now let's go over RIM vs Direct. Can you explain further by let's skip RIM drive and go to the Direct which is another animal.
Are you referring to the possibility of having a motor in direct contact with the spindle of your platter thus powering it up directly?
If so, that would go out of the scope of creating a universal device for more people, but rather be a re-design for a new TT.
Is that what you meant?
If not, please explain further.
Last edited:
Hello Everyone
I'm extremely interested in rim drive. Had a few experiments a couple of years ago but gave up as I couldn't get the motor to provide a consistent speed at the very slow speeds the motor needs to run at in this configuration. People may be aware that Teres do a rim drive (Think its known as the Verus?) and Vic of Transfi uses it on his Salvation turntable. By all accounts the results are excellent. Therefore I'm sure that people with a much better idea of design than I can come up with a workable solution- I'm sure it'll be worth it.
Regards
Chris
I'm extremely interested in rim drive. Had a few experiments a couple of years ago but gave up as I couldn't get the motor to provide a consistent speed at the very slow speeds the motor needs to run at in this configuration. People may be aware that Teres do a rim drive (Think its known as the Verus?) and Vic of Transfi uses it on his Salvation turntable. By all accounts the results are excellent. Therefore I'm sure that people with a much better idea of design than I can come up with a workable solution- I'm sure it'll be worth it.
Regards
Chris
Stefano,
I haven't ready your post yet, but have you found this forum posting about the a DC drive and circuit layout on Pink Fish Media?
Simple DC motor control - pink fish media
It's a very good discussion of the control circuit for DC motors and the Origin Live DC Motor upgrade. There is some speculation about which Maxon motor that Origin Live uses, but I did not read all the way to the end.
Also, checkout the Origin Live DC Motor upgrade. This looks like what you want to do.
Key Info (DC Kit)
The Origin Live solution looks a bit expensive. I would think your controller design and buying Maxon motors direct would save people a lot of money for DIY to be able to try a good DC solution.
Jamie
I haven't ready your post yet, but have you found this forum posting about the a DC drive and circuit layout on Pink Fish Media?
Simple DC motor control - pink fish media
It's a very good discussion of the control circuit for DC motors and the Origin Live DC Motor upgrade. There is some speculation about which Maxon motor that Origin Live uses, but I did not read all the way to the end.
Also, checkout the Origin Live DC Motor upgrade. This looks like what you want to do.
Key Info (DC Kit)
The Origin Live solution looks a bit expensive. I would think your controller design and buying Maxon motors direct would save people a lot of money for DIY to be able to try a good DC solution.
Jamie
Oh, yes I agree, Direct Drive has many other problems to solve. It looks like your DC idea is best because people are getting good results and the controller will be easier and less expensive to make. It sounds like you may have an improvement to the typical DC PSU by using the tachometer and it looks like all the commercial solutions are expensive for what they are. This looks like a very good group buy opportunity for the PCB's or other components you might need and that would save everyone a lot of money.
I can have some pulleys made, etc. and keep them cheap for people for our project if you will take care of the administration of things.
Jamie
I can have some pulleys made, etc. and keep them cheap for people for our project if you will take care of the administration of things.
Jamie
Just look at the components in an OL kit and tell me that the price charged is good value-I have. I understand the benefits of rim drive-either direct contact (motor pulley/rim) or using an intermediate wheel -are substantial-well worth a look! With a dc motor, the speed can be easily varied therefore it could be considered universal in application.
Chris
Chris
ChrisG139,
Are you saying the Origin Live is a good value? I'm not sure I understand you.
Just to be clear, I am not criticizing the price of any mfg solution since the cost just to put any product in proper packaging, advertising, overheads, etc. is very high. I am grateful for anyone who is willing to put a product on the market for such small volume of sales. There is no money in it for them.
But, I do think it can be instructive for DIY to see some cost of components and how if you can do some work yourself you can use better components, sometimes, for much less cost.
Cheers,
Jamie
Are you saying the Origin Live is a good value? I'm not sure I understand you.
Just to be clear, I am not criticizing the price of any mfg solution since the cost just to put any product in proper packaging, advertising, overheads, etc. is very high. I am grateful for anyone who is willing to put a product on the market for such small volume of sales. There is no money in it for them.
But, I do think it can be instructive for DIY to see some cost of components and how if you can do some work yourself you can use better components, sometimes, for much less cost.
Cheers,
Jamie
Sounds like a plan!
I will take care of the HW design, testing and prototyping. To prototype we will need two mechanical units: one for me and one for Pyramid.
I am glad people liked my idea! I thought this well before presenting it. I thought of what technology suits better the specific application, what motors could be most suitable etc etc....and I feel that this is a great opportunity for many people to take their analogue rig to the prong, with very little money compared to the commercial stuff. (unfortunately for the HW developer, it always cost much more because of all the prototyping needed, such as more PCB revisions buying extra parts, perhaps more than one motors to try the best solution....and this is not sponsored by a company ahahahah....it's sponsored by Stefano ahahahahah!)
For example Verus supply charges for it $1700 and the controller is really basic and won't offer you a great speed stability either way.
Regarding the mechanical model, would you have any problem creating a flywheel drive? This will require precise bearing and spindle for low noise and very precise wheel with groove for the O-ring. Do you think you can do it?
I am going to sketch a little more detailed design concept and see if there is anything we can do better here and if everybody likes it.
Regarding the link you attached: yes, I have seen it before and it is the very/most basic supply for DC motor control. Believe it or not, this is a cheap or better "cost effective" solution!
It will offer decent stability with minimum cost, but yet they charge you through the roof for this.
The controller Pyramid and I are planning on making is way more complex than that and will likely achieve a much better speed stability than that (We will include current feedback control on it as running it at such low RPMs we want to make sure torque is maintained constant.
I will take care of the HW design, testing and prototyping. To prototype we will need two mechanical units: one for me and one for Pyramid.
I am glad people liked my idea! I thought this well before presenting it. I thought of what technology suits better the specific application, what motors could be most suitable etc etc....and I feel that this is a great opportunity for many people to take their analogue rig to the prong, with very little money compared to the commercial stuff. (unfortunately for the HW developer, it always cost much more because of all the prototyping needed, such as more PCB revisions buying extra parts, perhaps more than one motors to try the best solution....and this is not sponsored by a company ahahahah....it's sponsored by Stefano ahahahahah!)
For example Verus supply charges for it $1700 and the controller is really basic and won't offer you a great speed stability either way.
Regarding the mechanical model, would you have any problem creating a flywheel drive? This will require precise bearing and spindle for low noise and very precise wheel with groove for the O-ring. Do you think you can do it?
I am going to sketch a little more detailed design concept and see if there is anything we can do better here and if everybody likes it.
Regarding the link you attached: yes, I have seen it before and it is the very/most basic supply for DC motor control. Believe it or not, this is a cheap or better "cost effective" solution!
It will offer decent stability with minimum cost, but yet they charge you through the roof for this.
The controller Pyramid and I are planning on making is way more complex than that and will likely achieve a much better speed stability than that
(We will include current feedback control on it as running it at such low RPMs we want to make sure torque is maintained constant.Arch,
I am curious about what you are saying about feedback coming too late. I was thinking that even with a very heavy platter that eventually the motor and controller must see a "signal" to add torque or whatever, even if this signal is just a difference of angle of rotor to armature, and that maybe the heavy platter just slows down this signal, or delays the signal in time, such that it really doesn't "solve" the problem.
Is this what you are saying, in a way?
I am still very curious about this needle dragging the record and slowing the platter. If this is true Wow and Flutter and even FFT measurement cannot measure this effect since they require test tones. Is the test tone the same drag on the needle?
This is why I am curious about Pyramids BLDC idea. He may be able to see the signal of speed change in the AC Polyphase motor much quicker than any other feedback control. It might be so quick that it would be hard to measure, except as measured in the control itself. If would then be up to the Golden Ears to say whether it has solved the "needle drag" phenomenon.
I do not understand controls well enough. But I think Pyramid is thinking he is working in microseconds in feedback. I'm talking out my **** a bit, but I think the control concept is orders of magnitude meaning 10X, 100X, 1000X faster than what is currently done in AC Synch or DC. The AC synch relies on the phase lag of the rotor to the field and will correct itself, but it has no intelligence to adjust current, voltage, or dampen the control input to avoid hysteresis, overshoot, undershoot of input.
Jamie
I am curious about what you are saying about feedback coming too late. I was thinking that even with a very heavy platter that eventually the motor and controller must see a "signal" to add torque or whatever, even if this signal is just a difference of angle of rotor to armature, and that maybe the heavy platter just slows down this signal, or delays the signal in time, such that it really doesn't "solve" the problem.
Is this what you are saying, in a way?
I am still very curious about this needle dragging the record and slowing the platter. If this is true Wow and Flutter and even FFT measurement cannot measure this effect since they require test tones. Is the test tone the same drag on the needle?
This is why I am curious about Pyramids BLDC idea. He may be able to see the signal of speed change in the AC Polyphase motor much quicker than any other feedback control. It might be so quick that it would be hard to measure, except as measured in the control itself. If would then be up to the Golden Ears to say whether it has solved the "needle drag" phenomenon.
I do not understand controls well enough. But I think Pyramid is thinking he is working in microseconds in feedback. I'm talking out my **** a bit, but I think the control concept is orders of magnitude meaning 10X, 100X, 1000X faster than what is currently done in AC Synch or DC. The AC synch relies on the phase lag of the rotor to the field and will correct itself, but it has no intelligence to adjust current, voltage, or dampen the control input to avoid hysteresis, overshoot, undershoot of input.
Jamie
Just look at the components in an OL kit and tell me that the price charged is good value-I have. I understand the benefits of rim drive-either direct contact (motor pulley/rim) or using an intermediate wheel -are substantial-well worth a look! With a dc motor, the speed can be easily varied therefore it could be considered universal in application.
Chris
Exactly!! You got all the points. If you look at the original thread this started on (Hurst motor), you will see that I post picture of the OL controller and it is ridiculous. No kidding why the speed stability is crap and yet they charge you like crazy.
The DC motor was also chosen because it can be re-adjusted at whatever speed (within reason of course) and adapted to many situations.
Either way the final model will try to be as universal as possible, so that everybody will be able to get one of this things and put it on their table and get a huge improvement that will probably take a table with big guns to compare
- Status
- This old topic is closed. If you want to reopen this topic, contact a moderator using the "Report Post" button.
- Home
- Source & Line
- Analogue Source
- New DC drive system for TT -RIM drive- starts here!!!